94 Functional Description Emotron AB 01-3694-01r2
Skip Speed 2 Low [346]
The same function as menu [344] for the 2nd skip range.
Communication information
Skip Speed 2 High [347]
The same function as menu [345] for the 2nd skip range.
Communication information
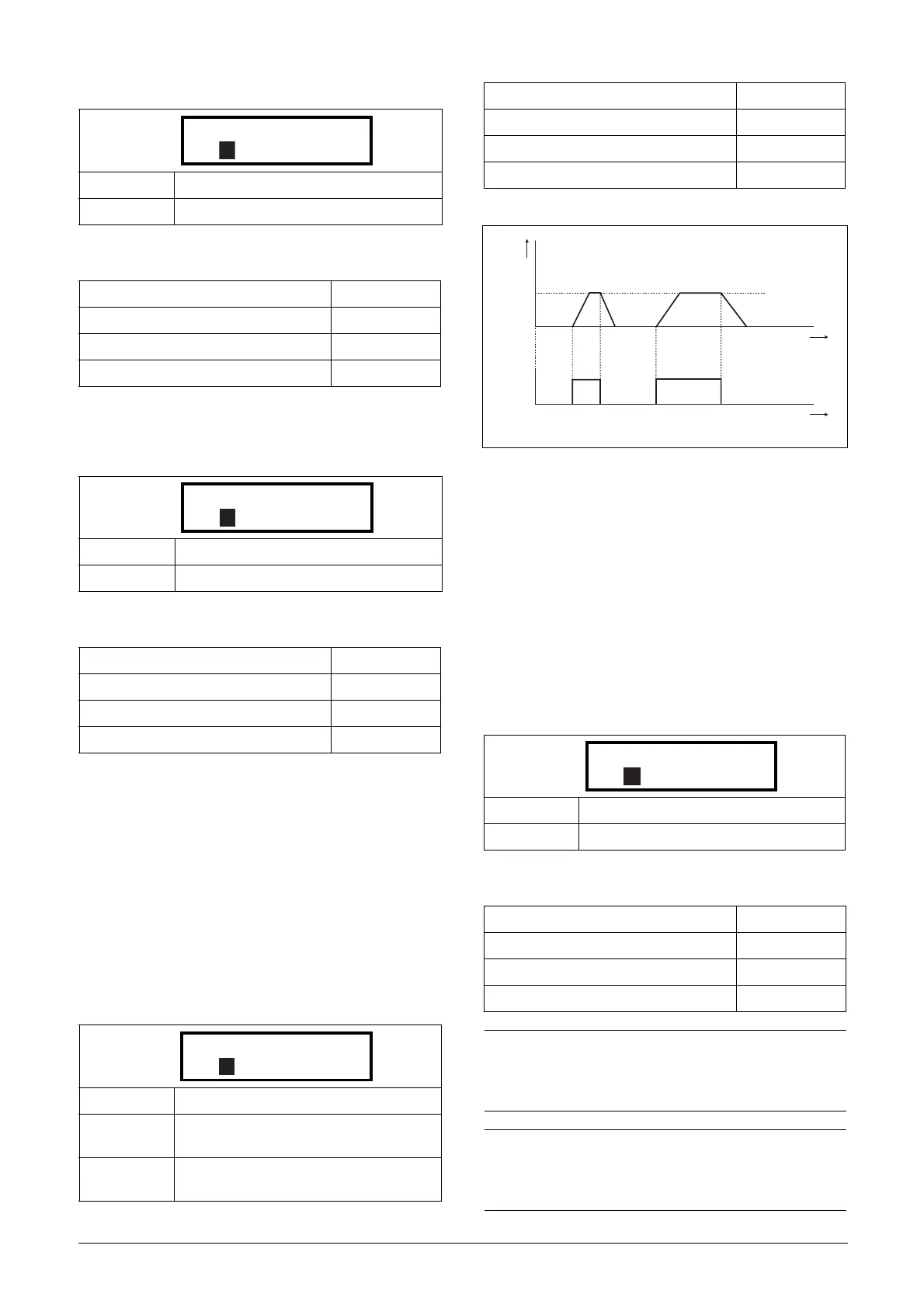
Jog Speed [348]
The Jog Speed function is activated by one of the digital
inputs. The digital input must be set to the Jog function
[520]. The Jog command/function will automatically gener-
ate a run command as long as the Jog command/function is
active. The rotation is determined by the polarity of the set
Jog Speed.
Example
If Jog Speed = -10, this will give a Run Left command at
10 rpm regardless of RunL or RunR commands. Fig. 80
shows the function of the Jog command/function.
Communication information
Fig. 80 Jog command
11.4.6 Torques [350]
Menu with all parameters for torque settings.
Maximum Torque [351]
Sets the maximum torque. This Maximum Torque operates
as an upper torque limit. A Speed Reference is always neces-
sary to run the motor.
Communication information
Default: 0 rpm
Range: 0 – 4 x Motor Sync Speed
Modbus Instance no/DeviceNet no: 43126
Profibus slot/index 169/30
Fieldbus format Int, 1=1 rpm
Modbus format Int, 1=1 rpm
Default: 0 rpm
Range: 0 – 4 x Motor Sync Speed
Modbus Instance no/DeviceNet no: 43127
Profibus slot/index 169/31
Fieldbus format Int, 1=1 rpm
Modbus format Int, 1=1 rpm
Default: 50 rpm
Range:
-4 x motor sync speed to +4 x motor sync
speed
Dependent on:
Defined motor sync speed. Max = 400%,
normally max=VSD I
max
/motor I
nom
x 100%.
346 SkipSpd 2 Lo
Stp 0rpm
A
347 SkipSpd 2 Hi
Stp 0rpm
A
348 Jog Speed
Stp 50rpm
A
Modbus Instance no/DeviceNet no: 43128
Profibus slot/index 169/32
Fieldbus format Int
Modbus format Int
Default: 120% calculated from the motor data
Range: 0–400%
Modbus Instance no/DeviceNet no: 43141
Profibus slot/index 169/45
Fieldbus format Long, 1=1%
Modbus format EInt
NOTE: 100% Torque means: I
NOM
= I
MOT
. The maximum
depends on the motor current and VSD max current
settings, but the absolute maximum adjustment is
400%.
NOTE: The power loss in the motor will increase by the
square of the torque when operating above 100%. 400%
torque will result in 1600% power loss, which will
increase the motor temperature very quickly.
t
t
f
(NG_06-F18)
Jog
Freq
og
com-
mand
T
MOT
Nm()
P
MOT
w()x60
n
MOT
rpm()x2Π
-----------------------------------------=
351 Max Torque
Stp 120%
A
 Loading...
Loading...