18
wrist orientation
The orientation of the lambda.7 haptic device is expressed by a reference frame R
wrist
which is nu-
merically represented using a 3x3 rotation matrix. This reference frame is expressed in relation to
the world coordinate system described in figure 14.
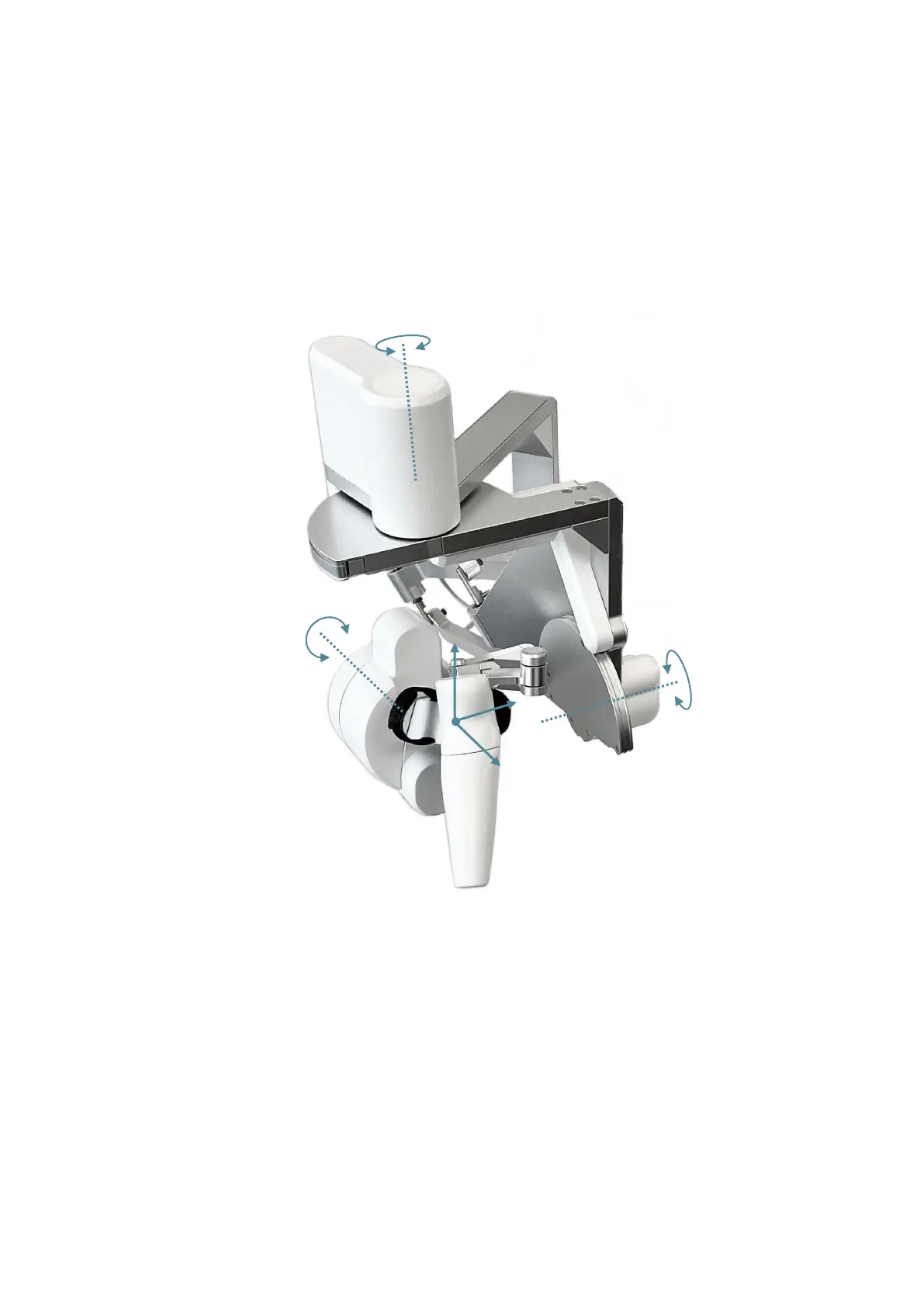
The reference frame of the wrist is computed from the angle values returned by the joint sensors
mounted of each revolute axis of the wrist as illustrated in figure 15. When all joint angles are
equal to zero, an identity rotation matrix is returned.
Figure 15 – Reference frame of the wrist of the lambda.7 haptic device
gripper angle
The angular position of the force gripper is returned in either degrees or radian.
A positive angle value is returned for right-hand lambda.7 haptic devices. A negative angle value
is returned for left-hand haptic devices.
Angular values closer to zero correspond to configurations where the force gripper is in a closed
configuration. Opening of the force gripper increases the magnitude of the angle.