■ Movement Principle of Electric Screwdriver Controller ( DO-1390A )
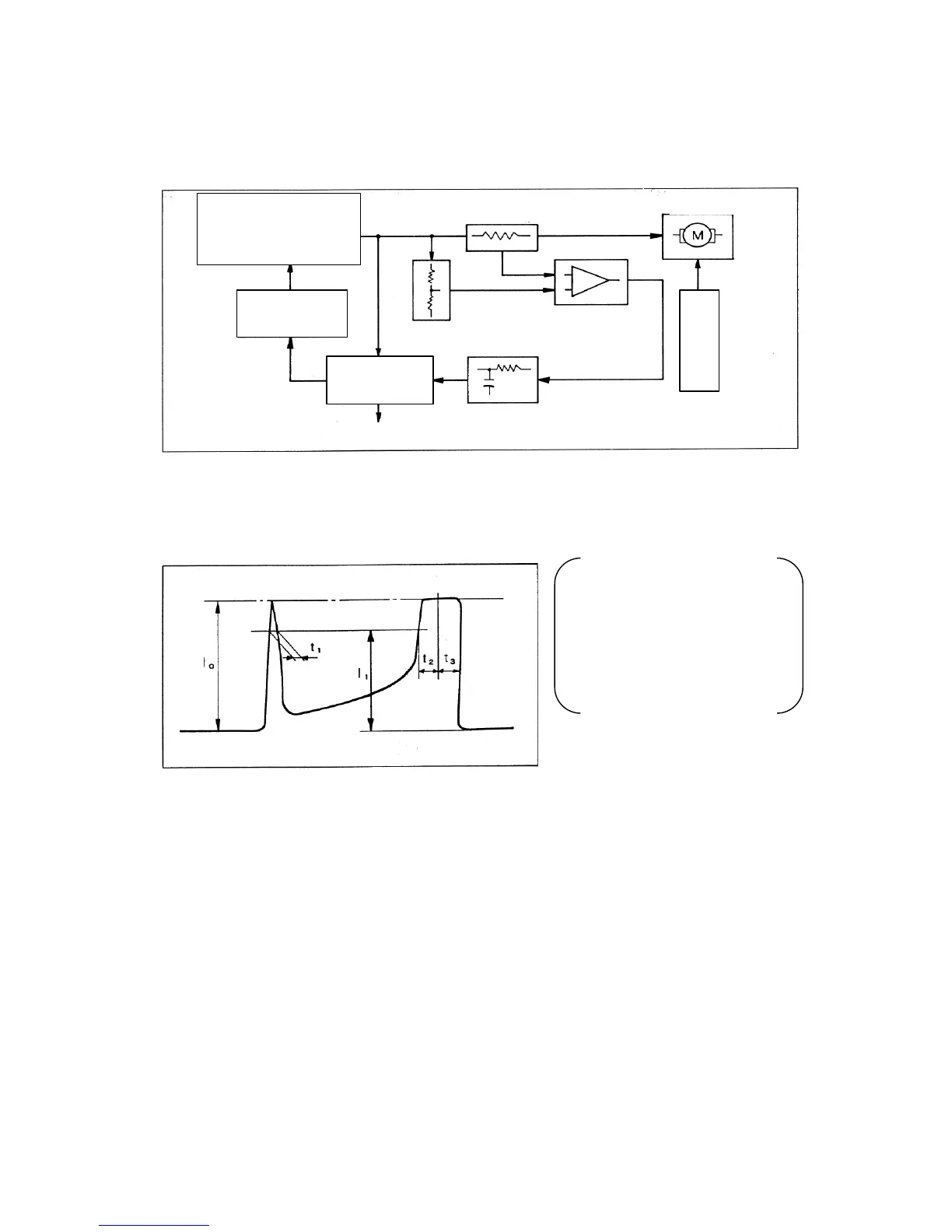
①Block chatr
②Electric current waveform
③Movement principle
Load current value of motor goes up as screw is fastened. Controller compares this value with the
preset one, and when the two values coincides, controller stops motors a determined time later.
④Reference
・ Load current is proportionate to fastening torque since DC motor is used.
・
Not to stop motor with starting current, the follwing condition is adopted.
t1 < t2
・ Current detection level for I 1 is set to 75% of I 0.
I0:Motor starting current
I1:Detected current ( 0.75*10)
t1:Current delay time in I1
( 50ms as follows)
t2:Delay time(t2>t1)
t2+t3:Holding time(0.05~
Constant-voltage regulated
power supply circuit
( torque changeable)
Electric current Detector( Torque detection)