Geometrics Inc. G-882 Cesium Marine Magnetometer Page 20
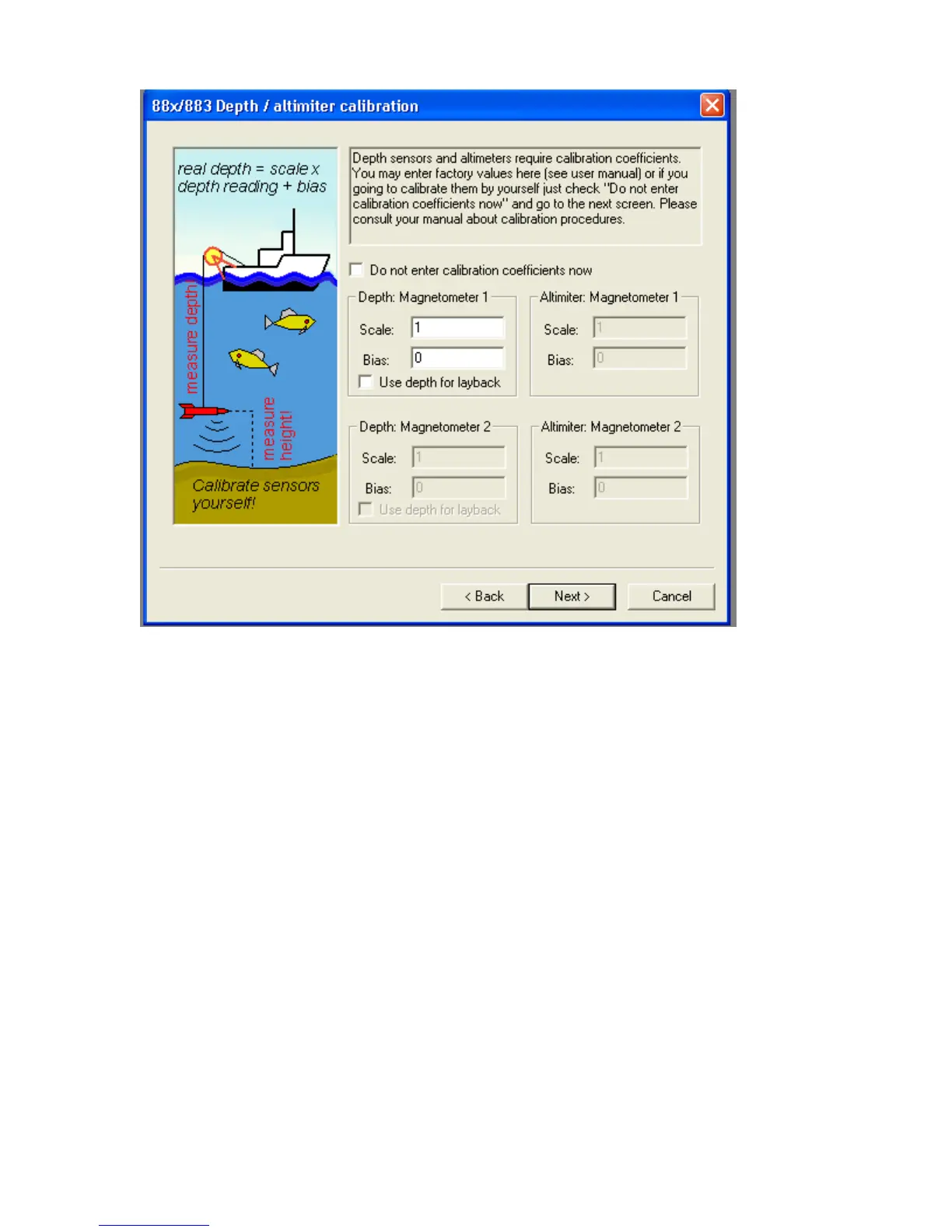
Figure 22
The next screen presented will set up the Interpolator feature. The interpolator
does the following:
1. Uses the GPS antenna latitude and longitude information and converts it to
UTM coordinates in meters.
2. Based on user input in this section (offset of antenna from tow point, length
of cable deployed), the program computes the position of the fish in UTM
coordinates. MagLog employs a proprietary “dragging algorithm” which
analyzes the track of the boat and makes a best estimate of the position of
the fish based on the physics. The computed UTM fish position is then
recalculated in Lat/Long and that information stored in the Interpolator file
(*.int).
3. This process occurs at 10 or 20 times per second (Hz) so that the position of
the fish is computed and stored with every reading. Because the GPS
information typically comes at 1 or 2 Hz, the position of the fish is
interpolated in between GPS fixes. This is why the feature is called the
Interpolator.
4. Addition of a heading Compass or Gyro greatly improves the computation of
the fish position. This is because when the ship is pointed in a direction
different from the direction of travel (due to side currents) the currents also
affect the position of the cable and fish system. MagLog will log common

 Loading...
Loading...