光毓机电 RMD-X8
V1.0
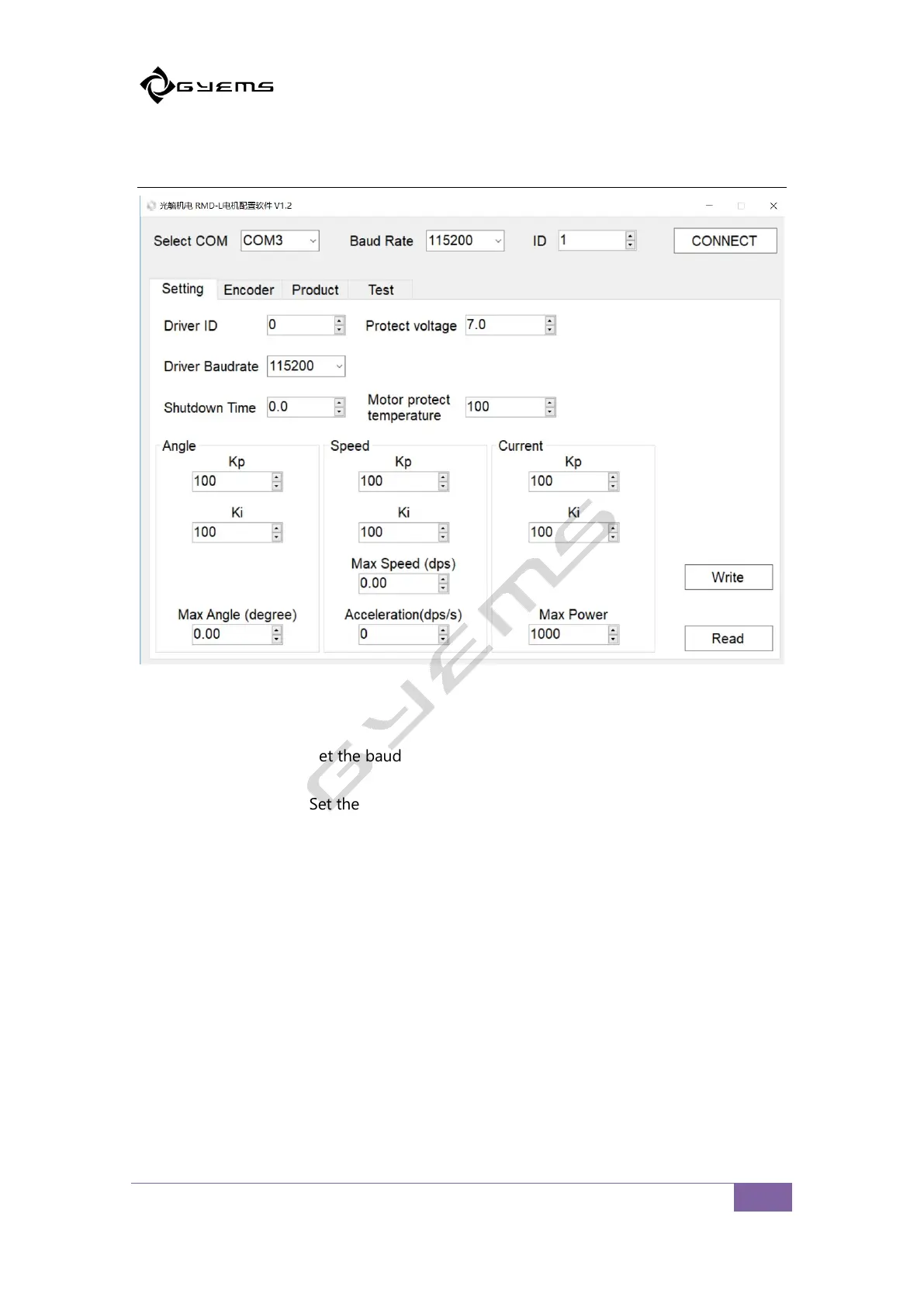
Driver Baudrate:Set the baud rate of the driver.
Shutdown Time:Set the shutdown time of the motor. If no control order is received
during this time, the power will be shut down; When set to 0, the motor will never be
turned off.
Angle:Angle loop control parameters. Kp and Ki modify the PI parameters of the
Angle loop, and Max Angle is used to limit the maximum rotation angle of the motor.
For example, when set to 3600, the maximum rotation angle of the motor is ±
3600°, namely positive and negative 10 turns.
Speed: Speed loop control parameter. Kp and Ki modify the PI parameters of the
Speed loop. Max Speed is used to limit the maximum rotation speed of the motor.
For example, when set to 720, the maximum angular speed of the motor is ±720°/s,
that is 2 cycles per second.
Current: torque loop control parameters. Kp and Ki modify the PI parameters of the
torque loop, and Max Power limits the final output to the motor.
 Loading...
Loading...