21
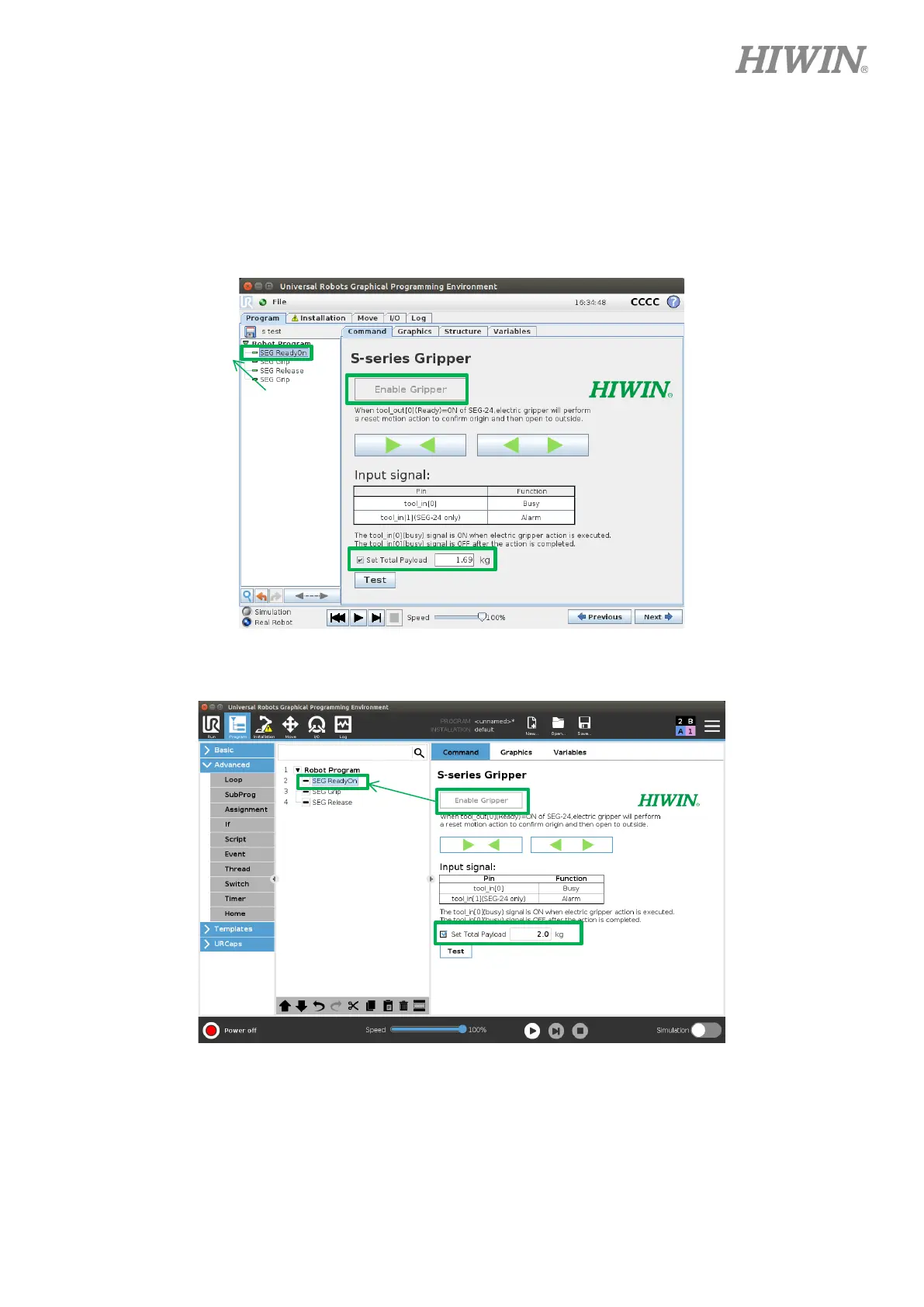
2. Set “Enable Gripper” to confirm the central point of gripper. Normally, it happen when the first
time supply the po wer.
Also, the total payload of the robot arm end can be set when the gripper is in any state. For
example, total payload of the robot arm end is 1 kg before the gripper clamping, and it can be
changed to 1.5 kg after clamping.
CB-series
e-series
 Loading...
Loading...
