51
Universal Robot model:UR5 with CB3.0
Software version:Polyscope version above 3.14
URCap version: URCap 2.0
Gripper type:XEG-16
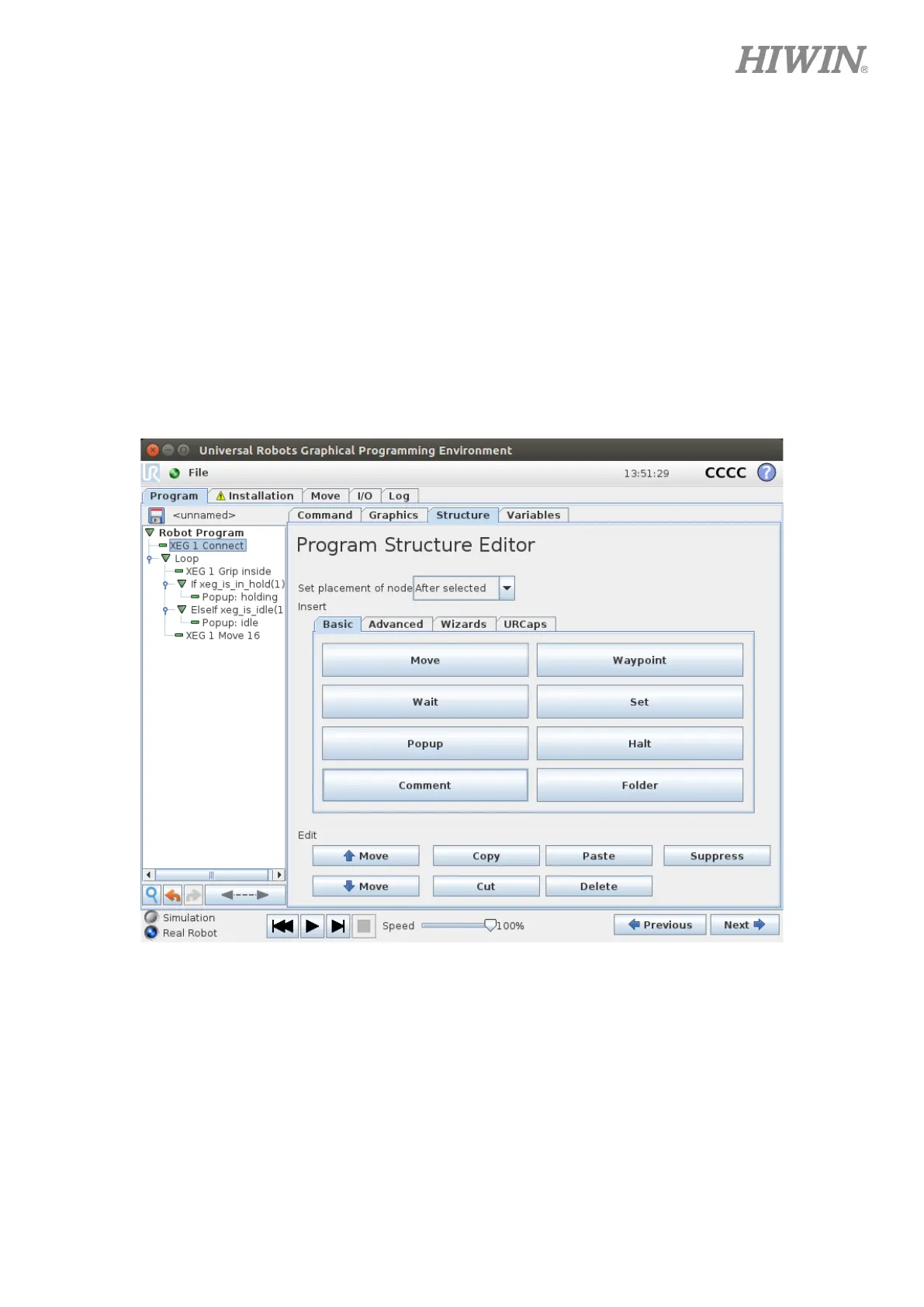
1. XEG Connect → Connect to the correct station number and model of the gripper. If the gripper is
connected successfully, the origin reset will be executed, otherwise an error warning will appear.
2. XEG Grip inside → Set grip stroke according to the actual application.
3. If xeg_is_in_hold → Popup “holding” when there is a one.
4. ElseIf xeg_is_idle → Popup “idle” when there is a one.
5. X -series Release → Set release stroke according to the actual application.
 Loading...
Loading...
