Figure
6-35.
Reection
Tracking
E
RF
These
three
errors
are mathematically
related to
the actual
data, S
11A
,
and
measured
data,
S
11M
,
by
the
following
equation:
S
11
M
=
E
D
F
+
(
S
11
A
E
R
F
)
(1
0
E
S
F
S
11
A
)
If the
value of
these
three
\E"
errors
and
the
measured
test
device
response
were
known
for
each frequency
,
the
above
equation
could
be
solved
for
S
11A
to obtain
the
actual
test
device
response.
Because
each
of
these
errors
changes
with
frequency
,
their
values
must
be
known
at each
test
frequency
.
These
values
are
found
by
measuring
the
system
at
the
measurement
plane
using
three
independent
standards
whose
S
11A
is
known
at
all
frequencies
.
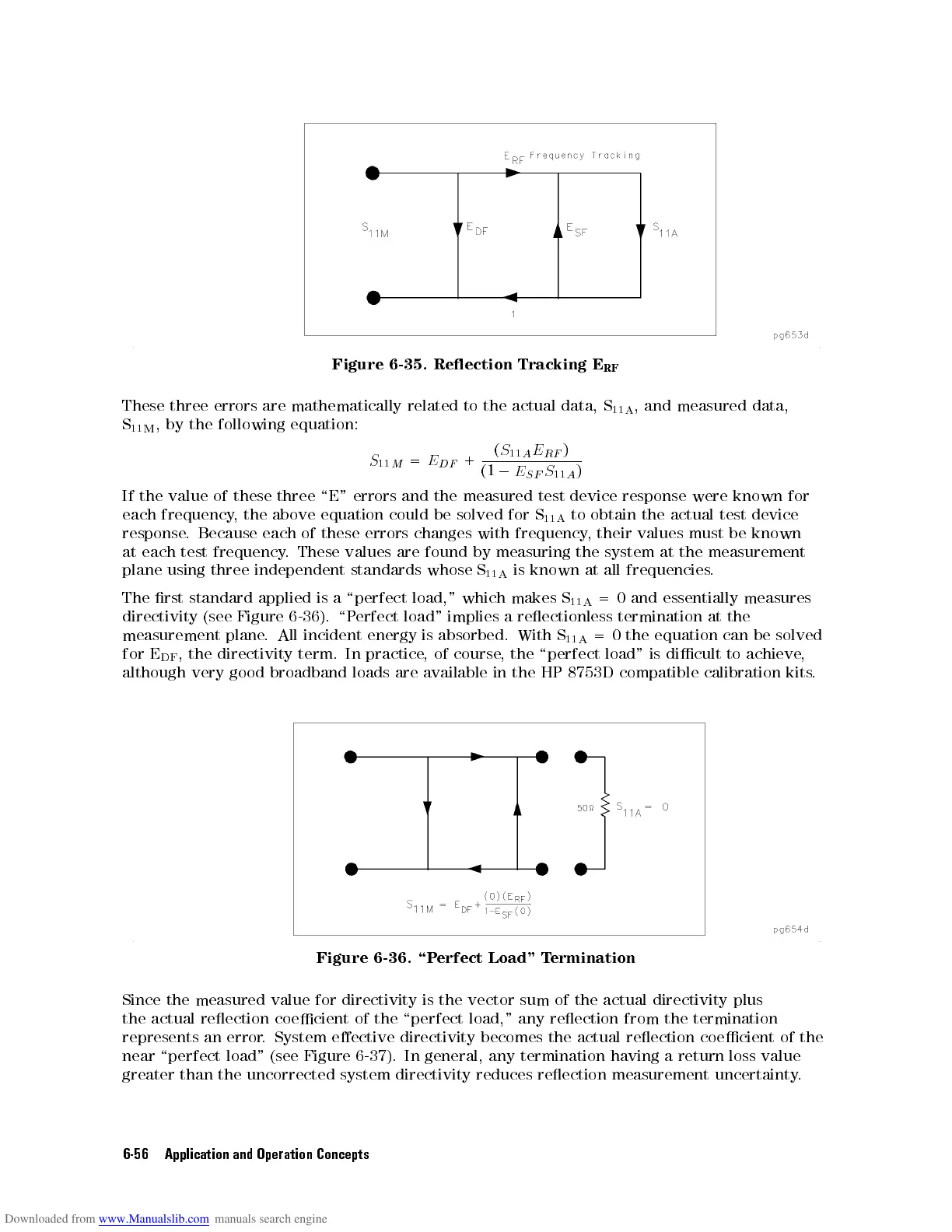
The
rst
standard
applied
is
a
\perfect
load,"
which
makes
S
11A
=
0
and
essentially
measures
directivity
(see
Figure
6-36
).
\P
erfect
load"
implies
a
reectionless
termination
at
the
measurement
plane
.
All
incident
energy
is
absorbed.
With
S
11A
=
0
the
equation
can
be
solved
for
E
DF
,
the
directivity
term.
In
practice
,
of
course
,
the
\perfect load"
is
dicult
to
achieve
,
although
very
good
broadband
loads
are
available
in
the
HP
8753D
compatible calibration
kits.
Figure 6-36. \P
erfect Load" T
ermination
Since the measured value for directivity is the vector sum of the actual directivity plus
the actual reection coecient of the \perfect load," any reection from the termination
represents an error. System eective directivity becomes the actual reection coecient of the
near \perfect load" (see Figure 6-37). In general, any termination having a return loss value
greater than the uncorrected system directivity reduces reection measurement uncertainty.
6-56 Application and Operation Concepts