Using Infineon’s radar baseboard XMC4700 and BGT24LTR11 radar
shield with Arduino
Set-up guide
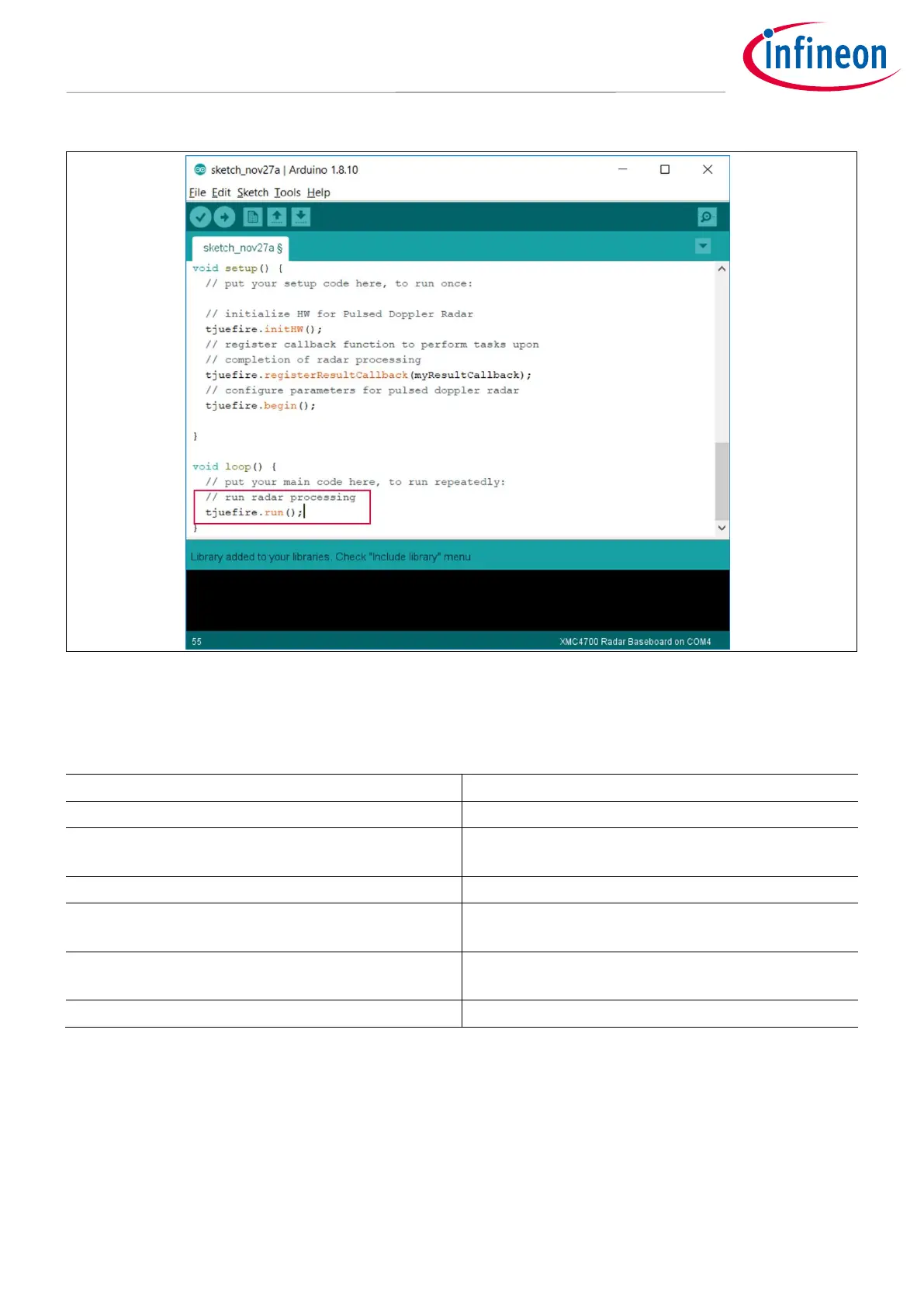
Figure 15 Call run() in main loop()
Table 3 lists the available control APIs for the Pulsed Doppler Radar Library.
Table 3 Control APIs
To initialize hardware for Pulsed Doppler Radar
void
registerResultCallback(void(*callBackPtr));
To register function to be called when radar process
is done
void registerErrorCallback(void(*callBackPtr));
To register function to be called in case of error
To initialize software parameters for Pulsed Doppler
Radar
To stop radar processing; usually called during
runtime before reconfiguring radar parameters
3.4 Example sketches
Two Arduino sketch examples are provided in the current library release. These examples can be accessed from
File > Examples > IFXRadarPulsedDoppler (Figure 16). Table 4 provides a brief description of these examples.

 Loading...
Loading...


