9
CD1-k – User Guide
Chapter 2 – Commissioning
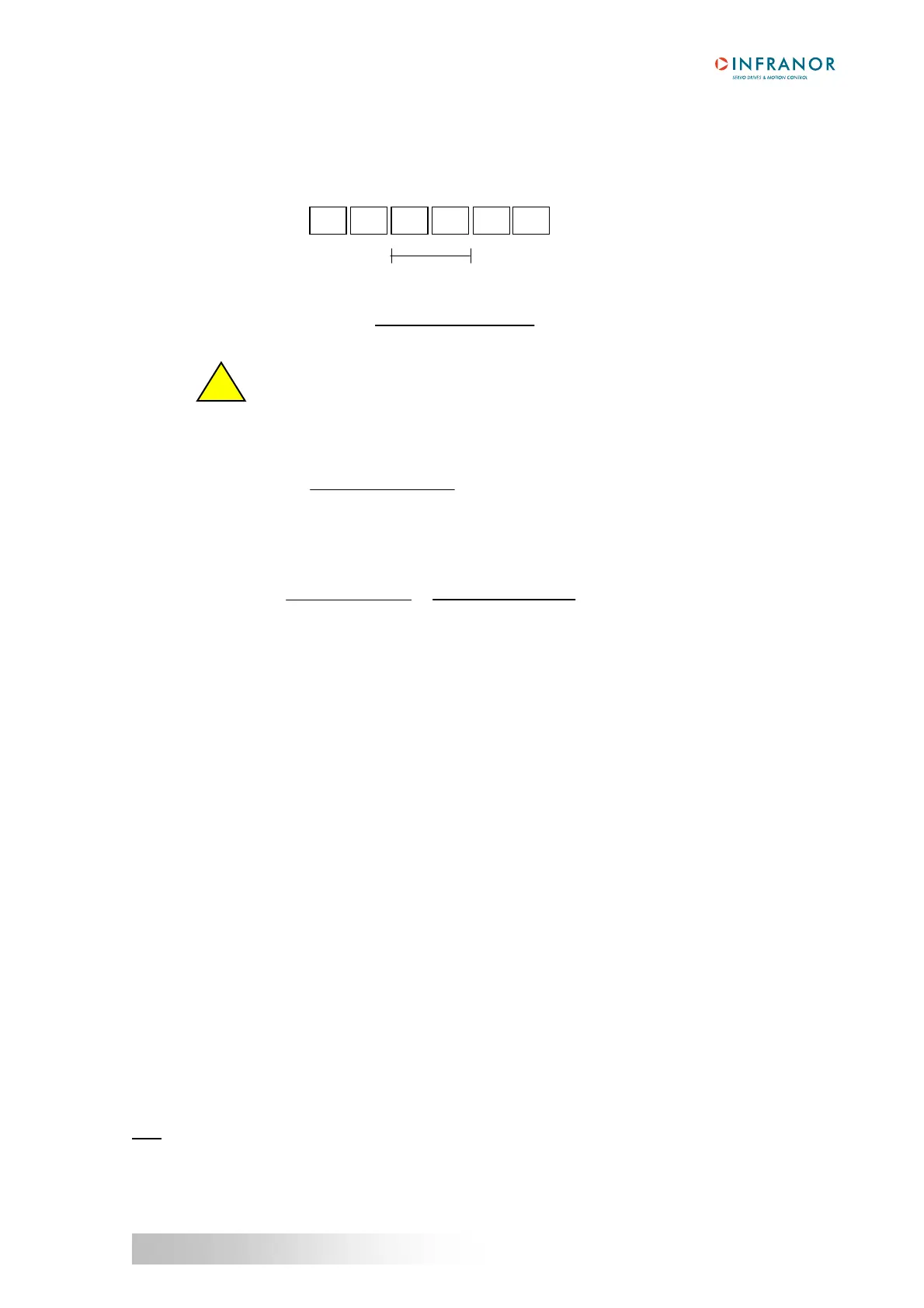
4.1.4 - PARAMETER ADJUSTMENT FOR A LINEAR MOTOR
The Motor encoder resolution parameter is calculated as follows:
The value of the motor Maximum speed parameter in rpm is calculated as follows:
The linear speed value in m/s is calculated as follows:
4.1.5 - MAXIMUM APPLICATION SPEED
The parameter Max. speed defines the maximum speed at which the amplifier can control the motor.
This parameter can be:
• lower than or equal to the maximum motor speed,
• slightly higher than the maximum motor speed in the application. This margin allows a speed overshoot
that avoids the position loop saturation (position following). This margin can be as small as possible
when using a high bandwidth or at low acceleration.
4.1.6 - CONFIGURATION OF THE THERMAL SENSOR
4.1.6.1 - Selection of the sensor type
The motor can be equipped either with a CTN sensor (ohmic resistance = decreasing temperature function) or
with a CTP sensor (ohmic resistance = increasing temperature function).
Check that the selected thermal sensor type actually corresponds to the sensor type mounted on the application
motor.
4.1.6.2 - Triggering threshold adjustment
Enter the sensor ohmic value (kOhm) corresponding to the required temperature value for the release of the
Motor overtemperature protection, according to the manufacturer's specifications.
4.1.6.3 - Warning threshold adjustment
Enter the sensor ohmic value (kOhm) corresponding to a warning temperature value.
When the warning temperature is reached, an information is sent via the CANopen bus.
Note
When using a CTN sensor, the warning ohmic value will be higher than or equal to the triggering ohmic value.
When using a CTP sensor, the warning ohmic value will be lower than or equal to the triggering ohmic value.
Pole pitch
N S N S N S
Motor magnets
1 encoder signal pitch = 4 counting increments
!
Motor pole pitch (mm)
Encoder signal pitch
Motor encoder resolution = 1000 x
Max. speed (rpm) = 60 x
x max. motor speed (m/s)
1000
Motor pole pitch (mm)
Motor speed (rpm)
60
x
Motor pole pitch (mm)
1000
Linear speed (m/s) =