16
trapuls – EtherCAT® Fieldbus Interface
Chapter 5 – Synchronization of Xtrapuls EtherCAT® slaves
Chapter 5 - Synchronisation of Xtrapuls EtherCAT®
slaves
The EtherCAT® fieldbus is well-suitable for multiaxis applications with time-critical constraints.
An internal software PLL is used in the Xtrapuls drive to synchronize the servo loops with a fieldbus-based clock
source.
Before entering the Safe-Op and Op states, the communication cycle period object (1006h) and the
synchronisation clock object (2012h) need to be carefully setup according to the slave’s setup performed by the
EtherCAT® master. These objects are detailed in the “Xtrapuls User Guide".
SYNC TYPE 0: SYNCHRONISATION AND PROCESS DATA EXCHANGE DISABLED
This is the default value of the synchronisation type at power-on of the drive. The servo loop is not synchronized
with the fieldbus. No PDO mapping is possible.
SYNC TYPE 1: SYNCHRONISATION DISABLED AND PROCESS DATA EXCHANGE ENABLED
No synchronisation of the servo loops takes place whereas the PDO mapping is performed.
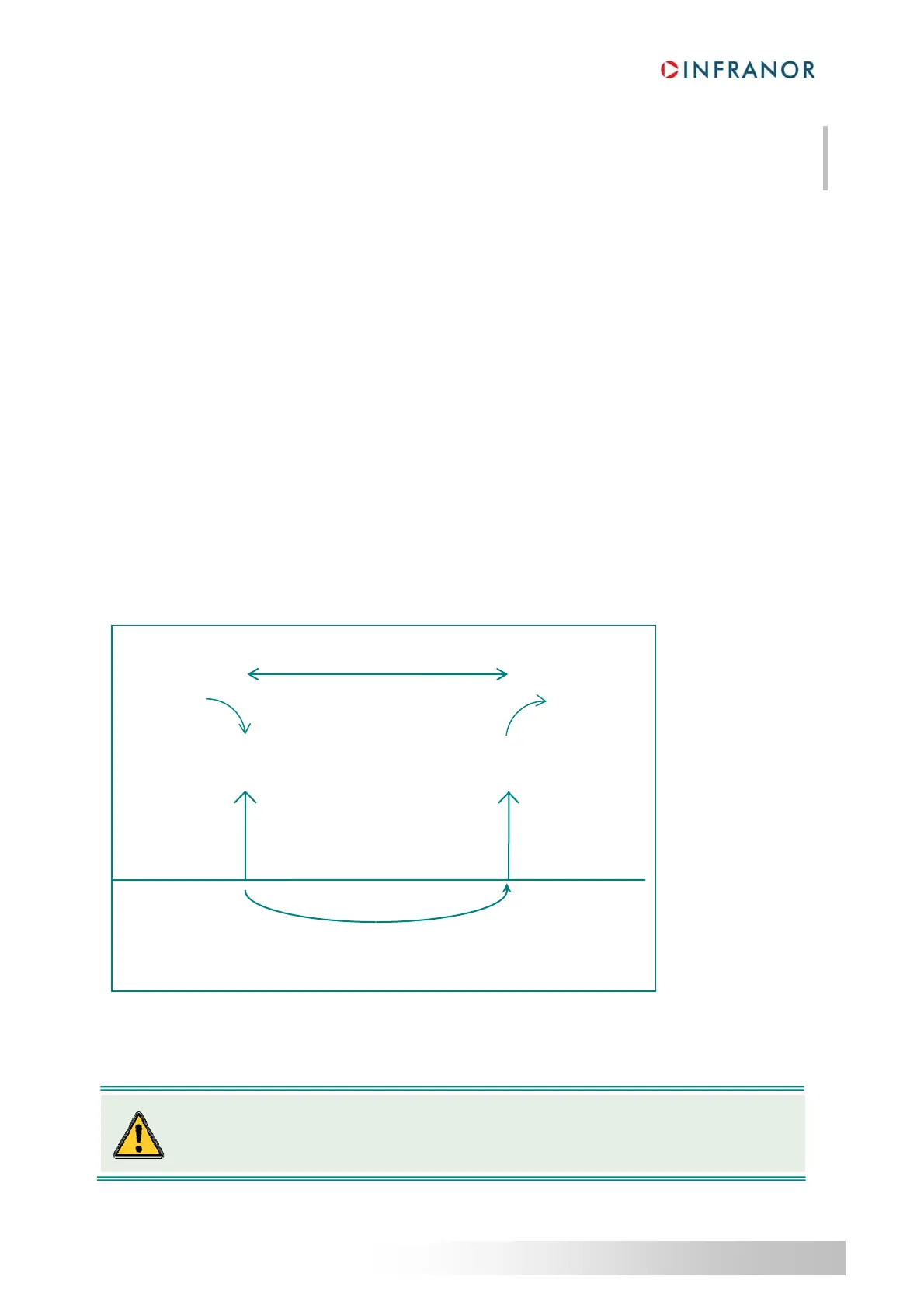
SYNC TYPE 2: SOFT SYNCHRONISATION
A clock event is generated every time an EtherCAT® telegram which carries RPDO is received by the Xtrapuls
drive. This clock event is the source of the internal software PLL to synchronize the servo loops. This clock event
is physically generated by the ESC Sync Manager channel 2 interruption.
The PDO mapping is performed in the following way:
In this synchronisation type, the EtherCAT® master is supposed to embed TPDO and RPDO in the same
EtherCAT® telegram.
The minimum communication cycle period with the soft synchronisation type using the EtherCAT® fieldbus is
2 ms.
Sync Type 4 : hard synchronisation (stiff)
Execution
of RPDOs
Communication cycle period
SM2 Event
(RPDO)
Sampling of
TPDOs
SM2 Event
(RPDO)
Reception
of RPDOs
Transmission
of TPDOs
With this type of synchronisation, distributed clocks should not be enabled by the master, otherwise
the transition Preop to Safe-Op will not be performed and the AL Status Code will be set to 26h,
meaning an inconsistent setting.