11
trapuls – EtherCAT® Fieldbus Interface
Chapter 4 – Specifications of the SDOs and PD0s for the EtherCAT®
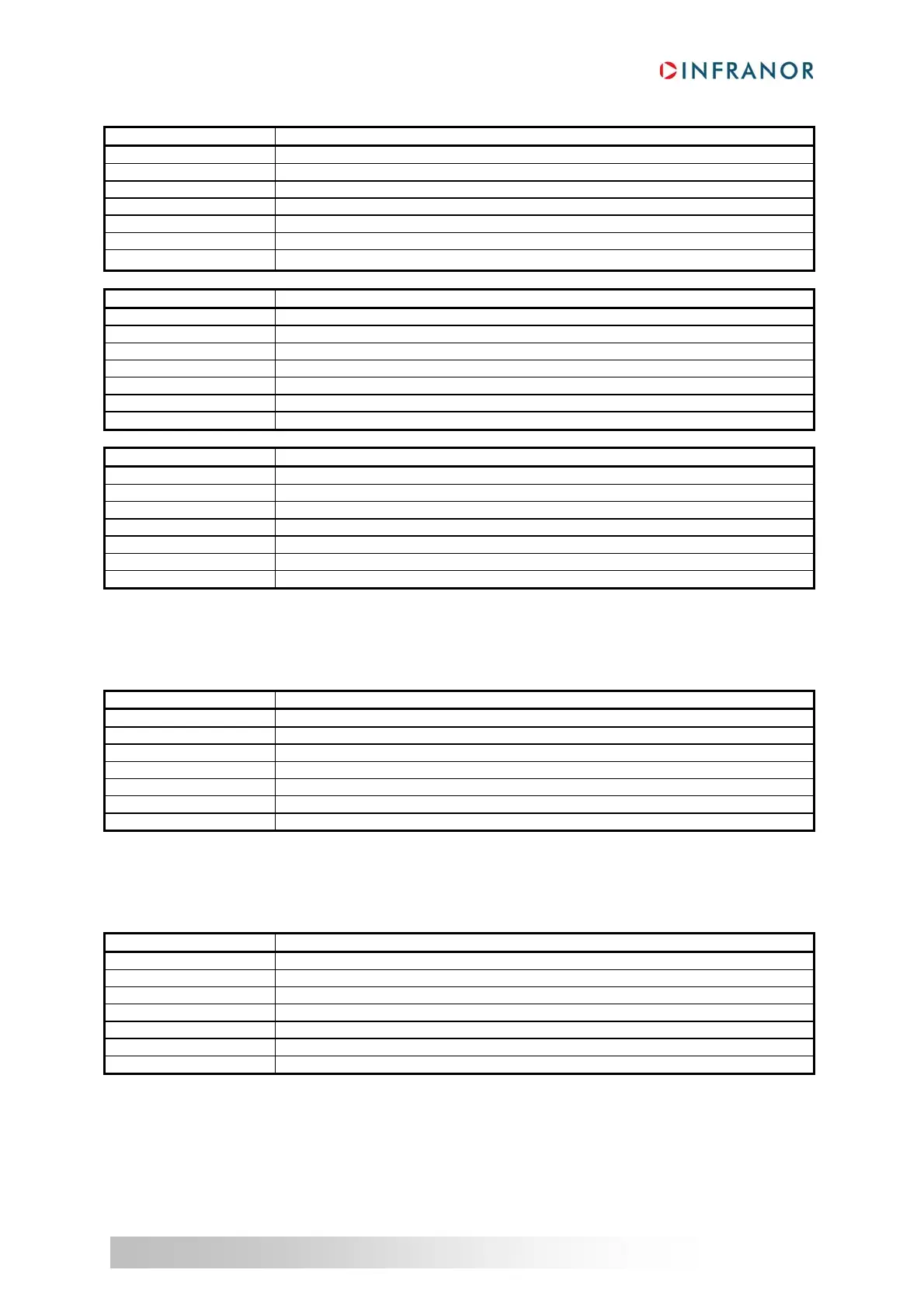
Sub Index 2
Name Communication type Sync Manager channel 2
Object Code VAR
Data Type Integer8
Object Class all
Access ro
PDO Mapping No
Default Value 2 : mailbox send (slave to master)
Sub Index 3
Name Communication type Sync Manager channel 3
Object Code VAR
Data Type Integer8
Object Class all
Access ro
PDO Mapping No
Default Value 3 : process data output (master to slave)
Sub Index 4
Name Communication type Sync Manager channel 4
Object Code VAR
Data Type Integer8
Object Class all
Access ro
PDO Mapping No
Default Value 4 : process data input (slave to master)
4.1.2 – SYNC MANAGER CHANNEL 0 PDO ASSIGNMENT
Value description
Index 0x1C10
Name Sync Manager channel 0 PDO assignment
Object Code VAR
Data Type Integer8
Object Class all
Access ro
PDO Mapping No
Default Value 0 : no PDO assigned
4.1.3
– SYNC MANAGER CHANNEL 1 PDO ASSIGNMENT
Value description
Index 0x1C11
Name Sync Manager channel 1 PDO assignment
Object Code VAR
Data Type Integer8
Object Class all
Access ro
PDO Mapping No
Default Value 0 : no PDO assigned