3.2.2.9 - Servo Loops
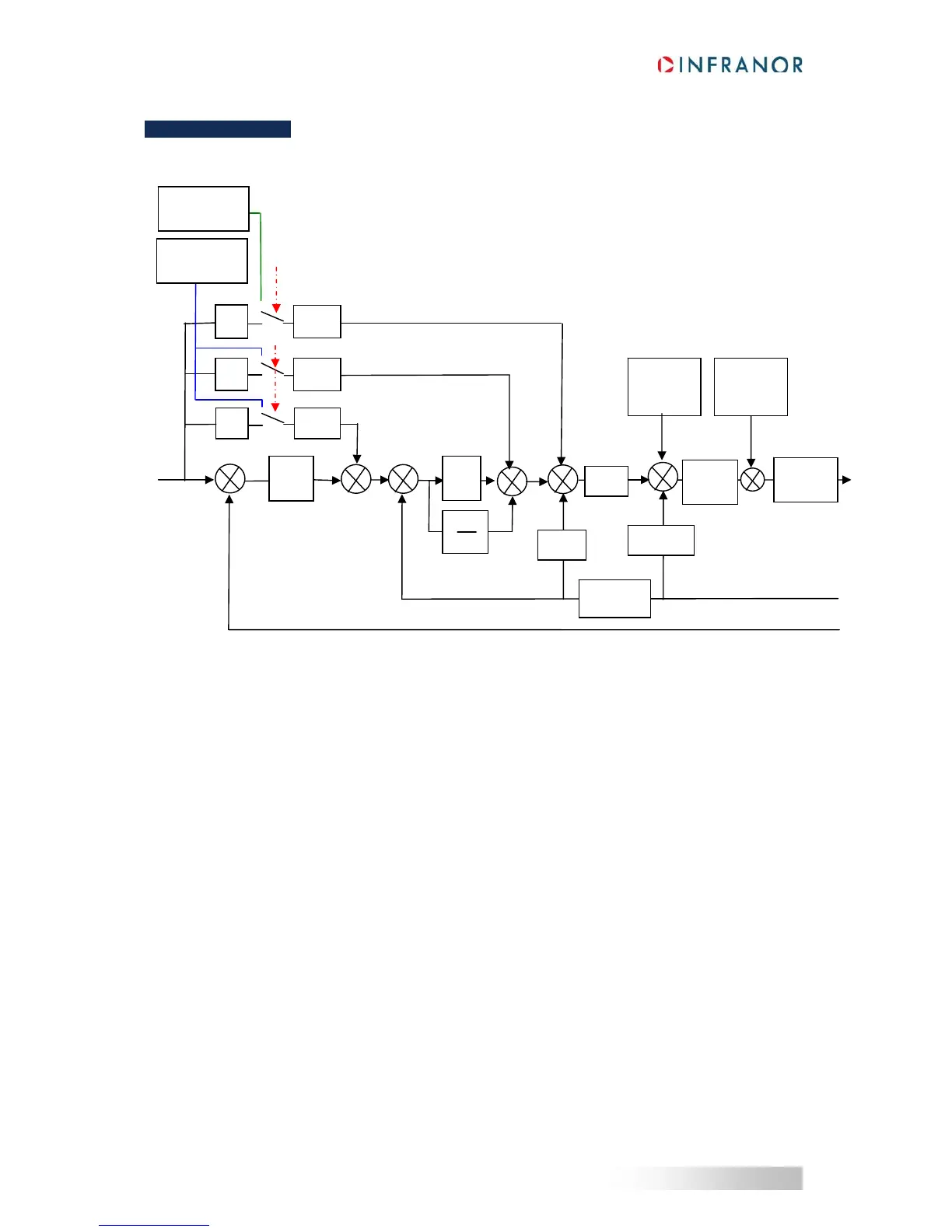
SERVO CONTROLLER STRUCTURE
Speed loop gains are the most critical to adjust because they greatly depend on the mechanical load
characteristics (inertias, frictions, coupling stiffness, resonances,...).
- Proportional speed gain (KPv): defines the proportional gain of the controller which acts on the speed error.
The higher this parameter value, the faster the speed loop response.
- Integral speed gain (KIv): defines the integral gain of the controller which acts on the speed error. The higher
this parameter value, the better the axis stiffness.
- Integrator low frequency limit (KIvf in Hz): defines the low frequency value from where the controller
integrator term is saturated. This parameter is used for reducing the motor heating in applications with large dry
frictions due to the mechanical load.
- Damping gain (KCv): defines the proportional gain of the controller which acts only on the speed feedback.
This parameter allows reducing the speed loop overshoot in response to a step like set point change.
- Derivative speed gain (KDv): defines the derivative gain of the controller which acts only on the speed
feedback.
- Derivator high frequency limit (KDvf in Hz): defines the high frequency value from which the controller
derivative term is saturated.
- Gain scaling factor (KJv): defines a multiplying factor for all speed regulator gains except the derivative gain
KDv. This parameter is scaling the speed regulator gains in order to avoid any saturation when large values are
required. This parameter also allows adjusting the servo loop stability in case of load inertia variations.
The Current command filter is a 3rd order, low-pass type filter, with 3 adjustable cut-off frequencies. Each cut-
off frequency value can be freely adjusted according to the application, for the filtering of high frequency noise or
of mechanical resonances.
Position
Set point
+
_
KPp
KFp
s
s
KAv
s²
Feedforward Selection (31FF-1)
_
+
KPv
KIv
s
+
+
Speed
Set point
KBv
Feedforward
Accel
0x31FF-3
Feedforward
Speed
0x31FF-2
Current
limit
Position
+
+
+
Speed
Idc
_
+
+
KCv
Speed
 Loading...
Loading...

