6 Parameter Table
6
- 95 -
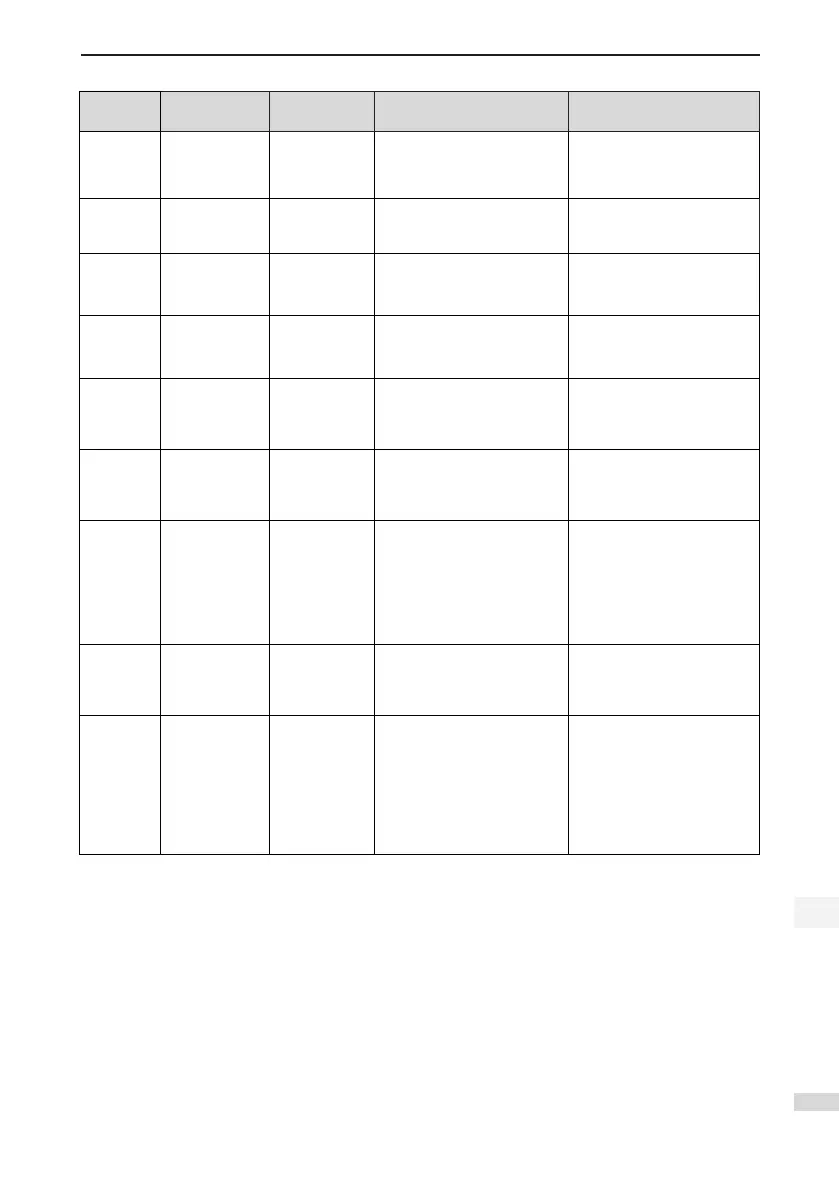
No.
Function
Symbol
Function Name Description Remarks
FunIN.21 HX1
Handwheel
multiplying
factor signal 1
HX1 valid, HX2 invalid: X10
HX1 invalid, HX2 valid: X100
Other: X1
It is recommended that the
logic of the corresponding
terminal be set to level valid.
FunIN.22 HX2
Handwheel
multiplying
factor signal 2
FunIN.23 HX_EN
Handwheel
signal
Invalid: Handwheel disabled
Valid: Handwheel enabled
It is recommended that the
logic of the corresponding
terminal be set to level valid.
FunIN.24 GEAR_SEL
Electronic gear
ratio switchover
Invalid: Electronic gear ratio 1
Valid: Electronic gear ratio 2
It is recommended that the
logic of the corresponding
terminal be set to level valid.
FunIN.25 TOQDirSel
Torque
reference
direction
selection
Valid: Forward direction
Invalid: Reverse direction
It is recommended that the
logic of the corresponding
terminal be set to level valid.
FunIN.26 SPDDirSel
Speed
reference
direction
selection
Valid: Forward direction
Invalid: Reverse direction
It is recommended that the
logic of the corresponding
terminal be set to level valid.
FunIN.27 POSDirSel
Position
reference
direction
selection
Valid: Actual position reference
direction same as given
position reference direction
Invalid: Actual position
reference direction opposite
to given position reference
direction
It is recommended that the
logic of the corresponding
terminal be set to level valid.
FunIN.28 PosInSen
Multi-position
reference
enable (edge
valid)
Invalid: Disabled, servo motor
in locked state
Valid: Enabled
It is recommended that the
logic of the corresponding
terminal be set to level valid.
FunIN.29 XintFree
Position change
on y unlock
Valid: The position change on
y state is unlocked, and the
servo drive can respond to
other position references.
Invalid: The position change on
y signal is retained, and the
servo drive does not respond
to other position references.
It is recommended that the
logic of the corresponding
terminal be set to edge valid.
 Loading...
Loading...