JIYI Robotics CO. Ltd
2.Disarm
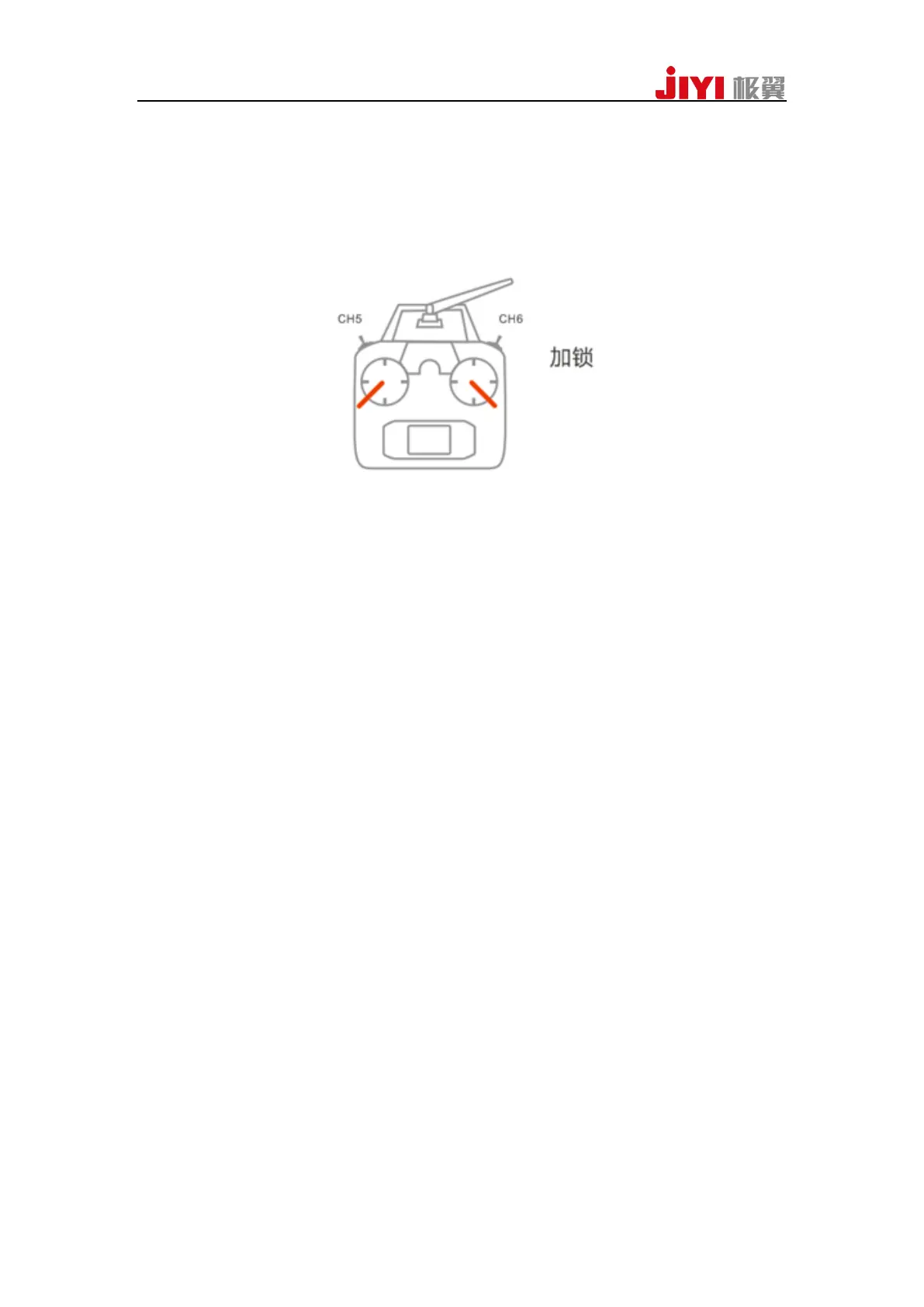
(1)Lmmediate disarmed
under all control modes, as long as motor is turned on, motors will stop spinning
immediately after you pull the sticks as it is shown in following figure.
Note:Do not pull the stick as is shown in the above figure during flight, otherwise the
motor will stop spinning immediately.
(2)Auto disarmed
a.No matter what flight mode it is in, if the aircraft doesn’t take off and at the same
time the throttle is put at lowest level after it is armed, and there are no operations in 3
seconds, the motors will be disarmed automatically.
b.Except in ATT-STA mode, FCU can auto recognize landing, and the aircraft will
stop automatically.
c.Except in ATT-STA mode, if the throttle is put at lowest level, the motor will not
stop spinning.
5.3.2Accelerometer calibration
Flight controller supports horizontal accelerometer calibration with remote controller,
and the calibration method is as follows.
1、Place aircraft horizontally.
2、Switch the return-to-home channel to the highest position, push the control stick of
the remote controller as ↘↗ (American style remote controller) or ↗↘ (Japanese
style remote controller), and when there is an alternating blinking of red, green and
yellow light, accelerometer calibration starts. The calibration will complete in 1 or 2
second(s), and then the LED light will blink normally.
5.3.3Compass Calibration
Flight controller supports compass calibration on remote controller.