IV Interfaces and options
IV.1 Incremental encoder interface (only for units without a CONNECT module)
The incremental encoder interface is included as part of the delivery package for servo-
drives which do not have a CONNECT module (standard version). Set the parameter ROD/SSI
to ROD with the operator software BS7200.
The position of the motor shaft is calculated in the servo-amplifier from the cyclically-absolute
14-bit information of the resolver digital converter. Pulses are derived from this information
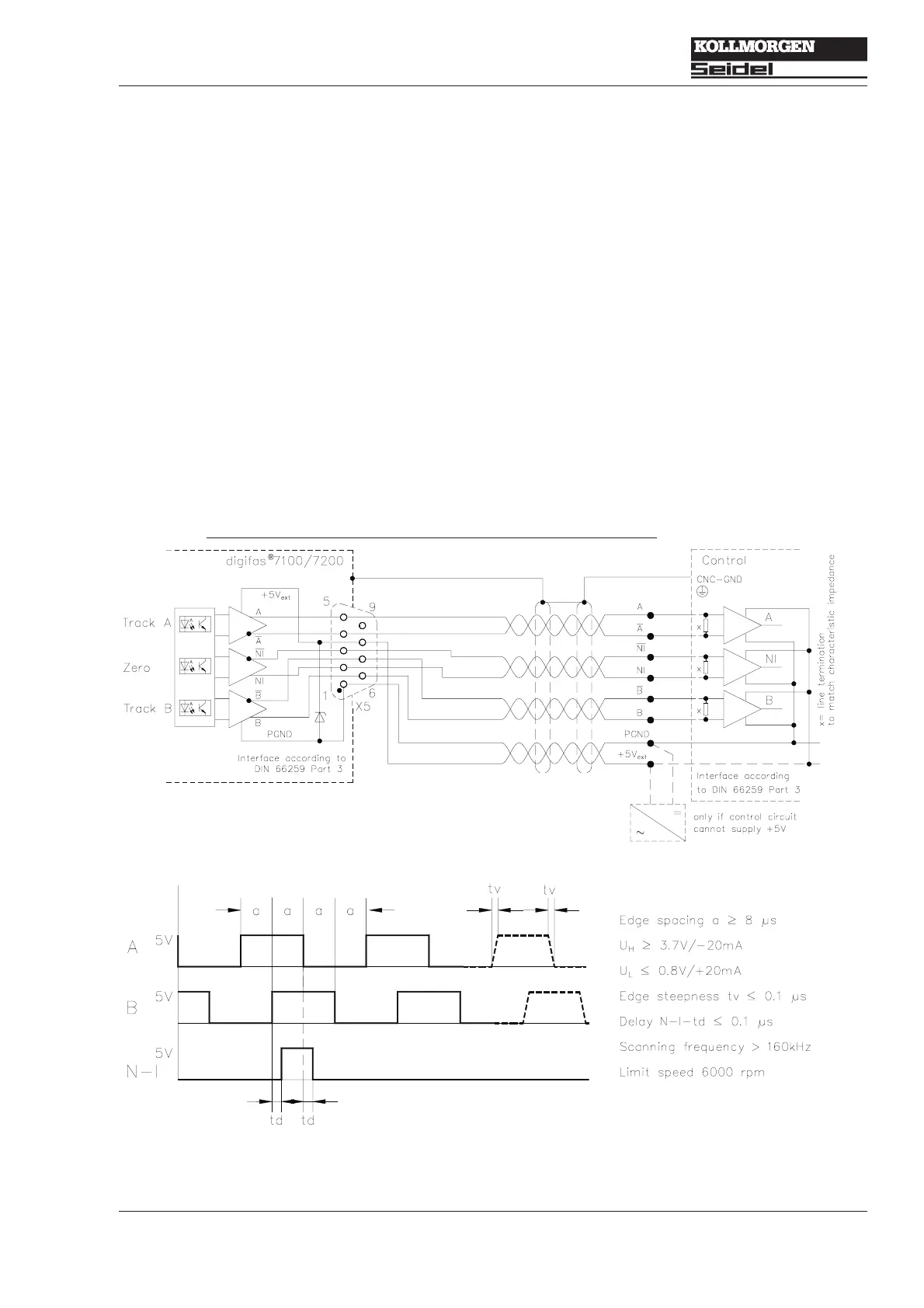
which are compatible to the incremental encoder. Two pulse trains (signals A and B) which are
electrically set off by 90° and a zero pulse are available at the SubD connector. You can choose
between 500, 512, 1000 and 1024 pulses per turn (parameter: RESOLUTION).
The position of the zero pulse can be adjusted over one mechanical turn and stored (parameter:
NI-OFFSET). The zero pulse can only be set with A=B=1, so as to maintain compatibility with
normal commercial encoders.
The power for the drivers is provided by an external supply voltage (GND: X5.1 and +5V: X5.8).
PGND must be connected to the control.
Incremental encoder interface : connections and signal definitions
Chapter IV Interfaces and options Page IV - 1
digifas
®
7200 series 03.98 - A.4.011.3/4

 Loading...
Loading...
