2 Description Lenord + BauerScope
22 GEL 2442
English
2 Description
2.1 Scope
The GEL 2442 MiniCoder is a space saving sensor for non-contact measuring of rota-
tional movements.
It can be used for measuring speeds and positions in gear boxes, machines, trans-
porters and high-speed spindles.
Output signals available are two-track 90° phase-shifted signals for direction detection
(tracks A and B), optionally with reference pulse (track N). The output frequency of the
signals covers a range from 0 Hz (standstill) to 200 kHz at maximum.
2.2 Functional principle
The GEL 2442 scans the target (toothed wheel)
consisting of a ferromagnetic material. The mag-
netic field of the sensor is modulated by the passing
of the ferromagnetic toothed wheel. This modula-
tion is evaluated in the sensor and converted to a
sine output signal.
1
1
2
2
N*
N
* Optional
The given maximum distance and other mounting tolerances must be maintained. Oth-
erwise, correct operating of the speed sensor over the whole temperature and frequen-
cy range cannot be guaranteed.
A separate electronic circuit (optionally deliverable by lenord+bauer) provides the pow-
er supply for the MiniCoder, performs the evaluation of the measuring pulses and es-
tablishes the closed loop.
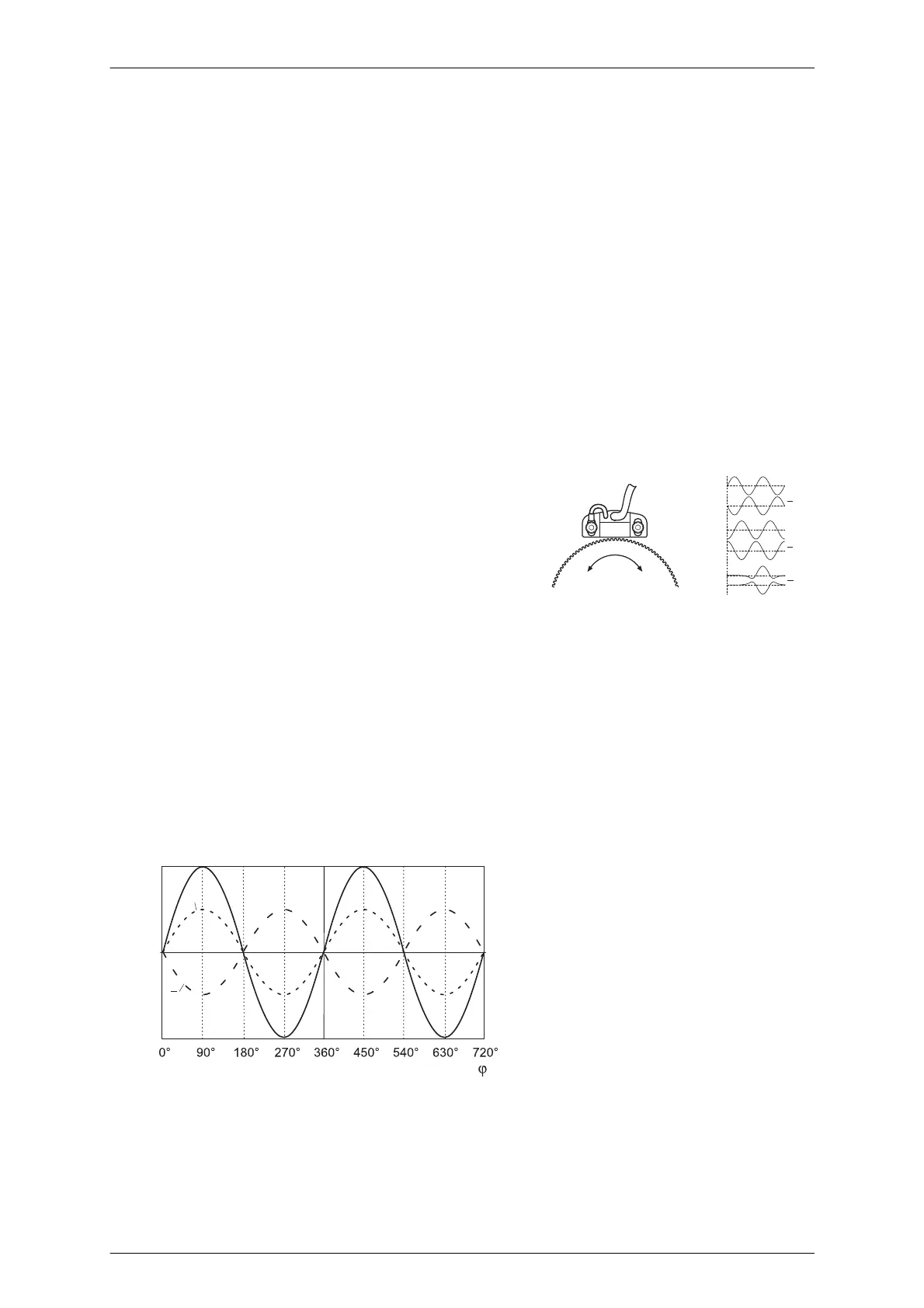
Sinusoidal measuring signals (for track 1 here):
3 V
2.5 V
U =
ref
U
1
U
1
2 V
ϕ Phase angle (ϕ = 2 π f t)
U
S
= 5 V DC
û = 250 mV
u
1
(t) = U
S
/2 + û sin(2 π f t)
ū
1
(t) = U
S
/2 – û sin(2 π f t)
u
2
(t) = U
S
/2 ∓ û cos(2 π f t)*
ū
2
(t) = U
S
/2 ± û cos(2 π f t)*
* Sign depends on sense of rotation
with f: frequency; U
S
: Supply voltage; û: Amplitude of voltage