2 Beschreibung Lenord + BauerEinsatzbereich
6 GEL 2442
Deutsch
2 Beschreibung
2.1 Einsatzbereich
Der Einbaugeber GEL 2442 ist eine platzsparende Lösung zur berührungslosen Mes-
sung von Rotationsbewegungen.
Er kann für die Drehzahl-, Winkel- und Positionsmessung an Getrieben, Maschinen,
Motoren und Hochgeschwindigkeitsspindeln eingesetzt werden.
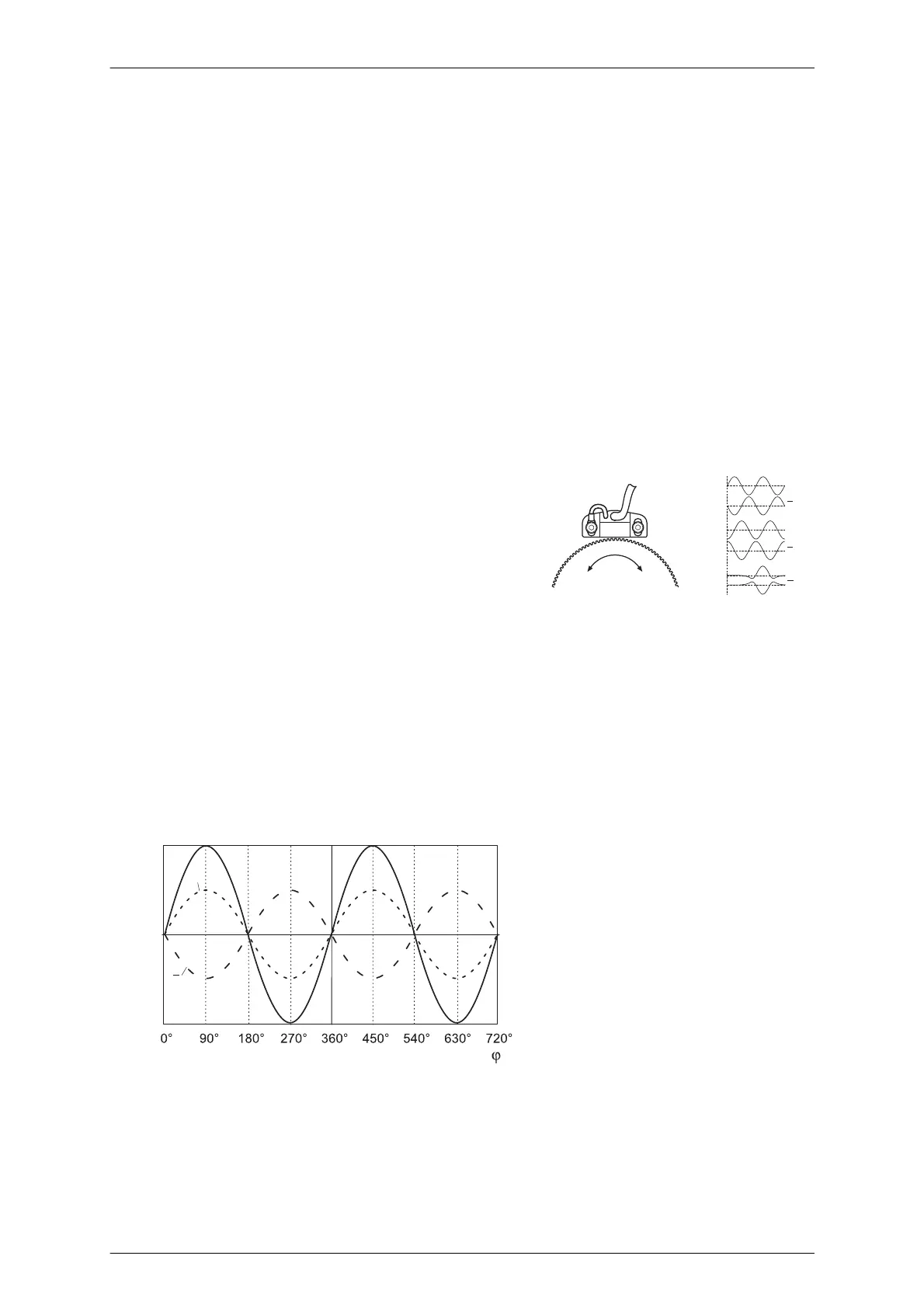
Ausgangssignale sind zwei um 90° phasenversetzte sinusförmige Signale zur Rich-
tungserkennung (Spuren 1 und 2), wahlweise mit Referenzimpuls (Spur N). Die Aus-
gangsfrequenz der Signale reicht dabei von Stillstand (0 Hz) bis zu maximal 200 kHz.
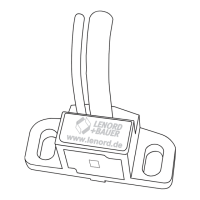
2.2 Funktionsprinzip
Der GEL 2442 tastet eine Maßverkörperung (Mess-
zahnrad) aus ferromagnetischem Material ab. Das
Magnetfeld des Einbaugebers wird durch die sich
bewegende Maßverkörperung moduliert. Die Mag-
netfeldänderung wird vom Sensor erkannt und in
ein sinusförmiges Ausgangssignal umgesetzt.
1
1
2
2
N*
N
* Optional
Der angegebene Maximalabstand und andere mechanische Einbautoleranzen sind
unbedingt einzuhalten. Nur so kann die Funktion des Drehzahlsensors über dem ge-
samten Temperatur- und Frequenzbereich sichergestellt werden.
Eine separate Elektronik (als Option von Lenord+Bauer lieferbar) sorgt für die Speisung
des MiniCoders, die Auswertung der Impulszahlen und den Aufbau eines Regelkreises.
Sinusförmige Messsignale (hier für Spur 1):
3 V
2.5 V
U =
ref
U
1
U
1
2 V
ϕ Phasenwinkel (ϕ = 2 π f t)
U
B
= 5 V DC
û = 250 mV
u
1
(t) = U
B
/2 + û sin(2 π f t)
ū
1
(t) = U
B
/2 – û sin(2 π f t)
u
2
(t) = U
B
/2 ∓ û cos(2 π f t)*
ū
2
(t) = U
B
/2 ± û cos(2 π f t)*
*Vorzeichen je nach Drehrichtung
mit f: Frequenz; U
B
: Versorgungsspannung; û: Amplitude der Spannung