System bus (CAN) with Ser vo PLC & Drive PLC
System blocks
6.6 CAN_Synchronization
6-21
L PLC-Systembus EN 1.1
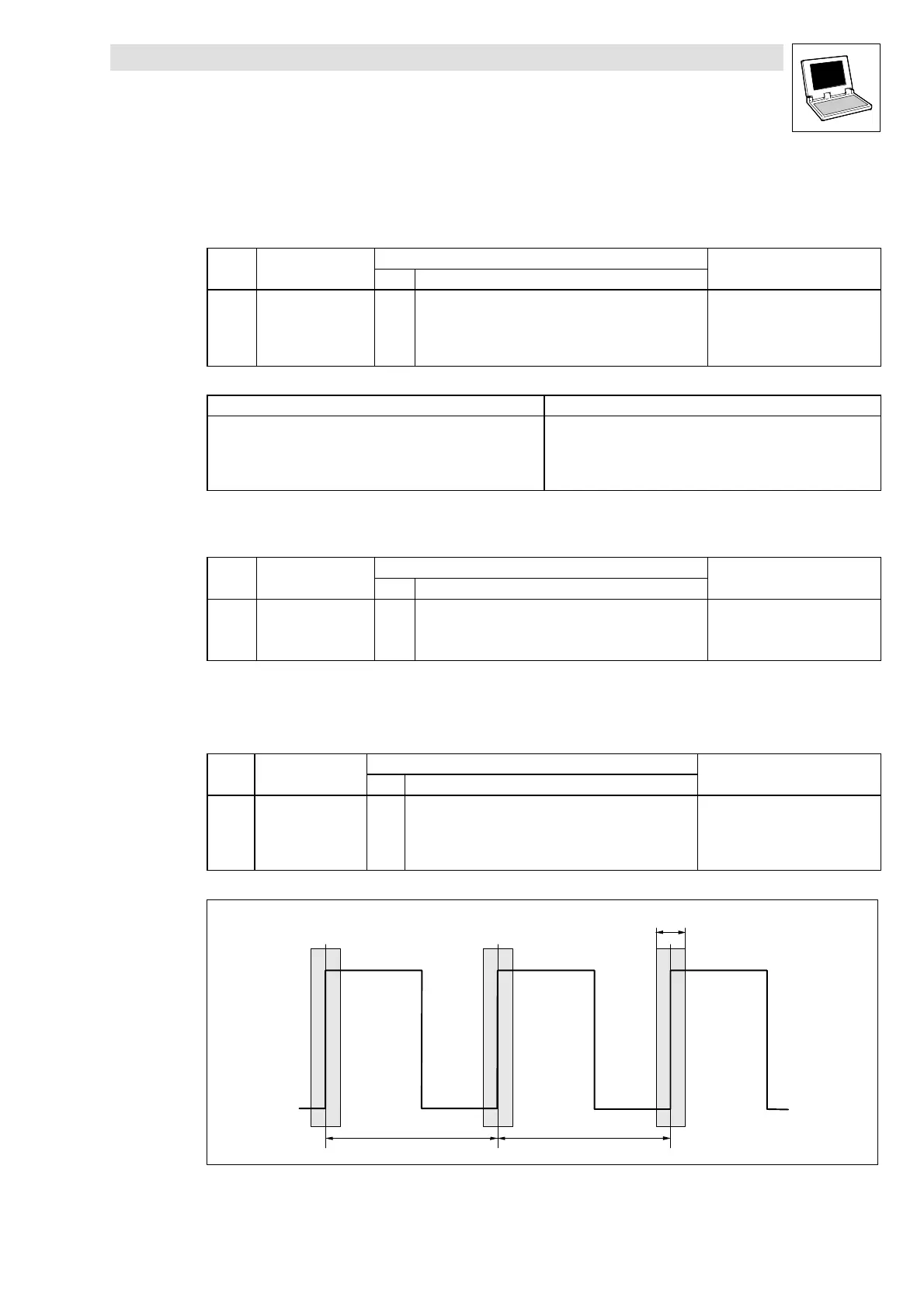
Synchronisation cycle
The controllers/PLCs receive the Sync telegram/signal and compare the time between two LOW-
HIGH edges of the signal to the set cycle time (C1121).
Code LCD
Possible settings
IMPORTANT
Lenze Choice
[C1121] Sync cycle 2 1{1msec}13Synchronisation cycle
Definition of the cycle time of the
Sync telegram/signal.
• Parameter setting is only
required for the slave!
Synchronisation via system bus (C1120 = 1) Synchronisation v ia terminal (C1120 = 2)
• The master sends a periodic Sync telegram for synchronisation.
Sync telegram.
• The value set under C1121 is the time between two Sync
telegrams of the master.
Sync telegrams of the master.
• The master sends a periodic Sync telegram for synchronisation.
Sync signal.
• The value set under C1121 is the time between two
Sync signals (LOW-HIGH edge) of the master on the corresponding
terminal.
Phase shift
Code LCD
Possible settings
IMPORTANT
Lenze Choice
[C1122] Sync phase 0 0 {0.001 ms} 6.5 Synchronisation phase
Phase shift between the Sync tele-
gram/signal and the start of the in-
ternal control program.
Synchronisation monitoring (time window)
The variable
CAN_bSyncInsideWindow_b
can be used for synchronisation monitoring.
Code LCD
Possible settings
IMPORTANT
Lenze Choice
[C1123] Sync window 0 0 {0.001 ms} 6.5 Synchronisation window
If the Sync telegram/signal from the
master is within this ”time window”,
CAN_bSyncInsideWindow_b = swit-
ches to TRUE .
Sync signal
Sync window
SyncCycle SyncCycle
Fig. 6-11 ” Time window” for the LOW-HIGH edges of the Sync signal