Commissioning
5-6
SHB9300CRV EN 2.0
5.5.2 Adapt controller to the motor
To achieve an optimum speed-torque characteristic for the drive, it is necessary to enter the
nameplate data of the connected motor.
With Lenze motors:
Field Command Function
3 Click ”motor type (A)”. Select connected motor.
4 Click ”encoder (B)”. Selected feedback system used.
5 Click ”master value”. Setting of the master-value incremental encoder
For motors with a resolver, use the eight-digit designation of the motor nameplate ”encoder” (as an
option).
l
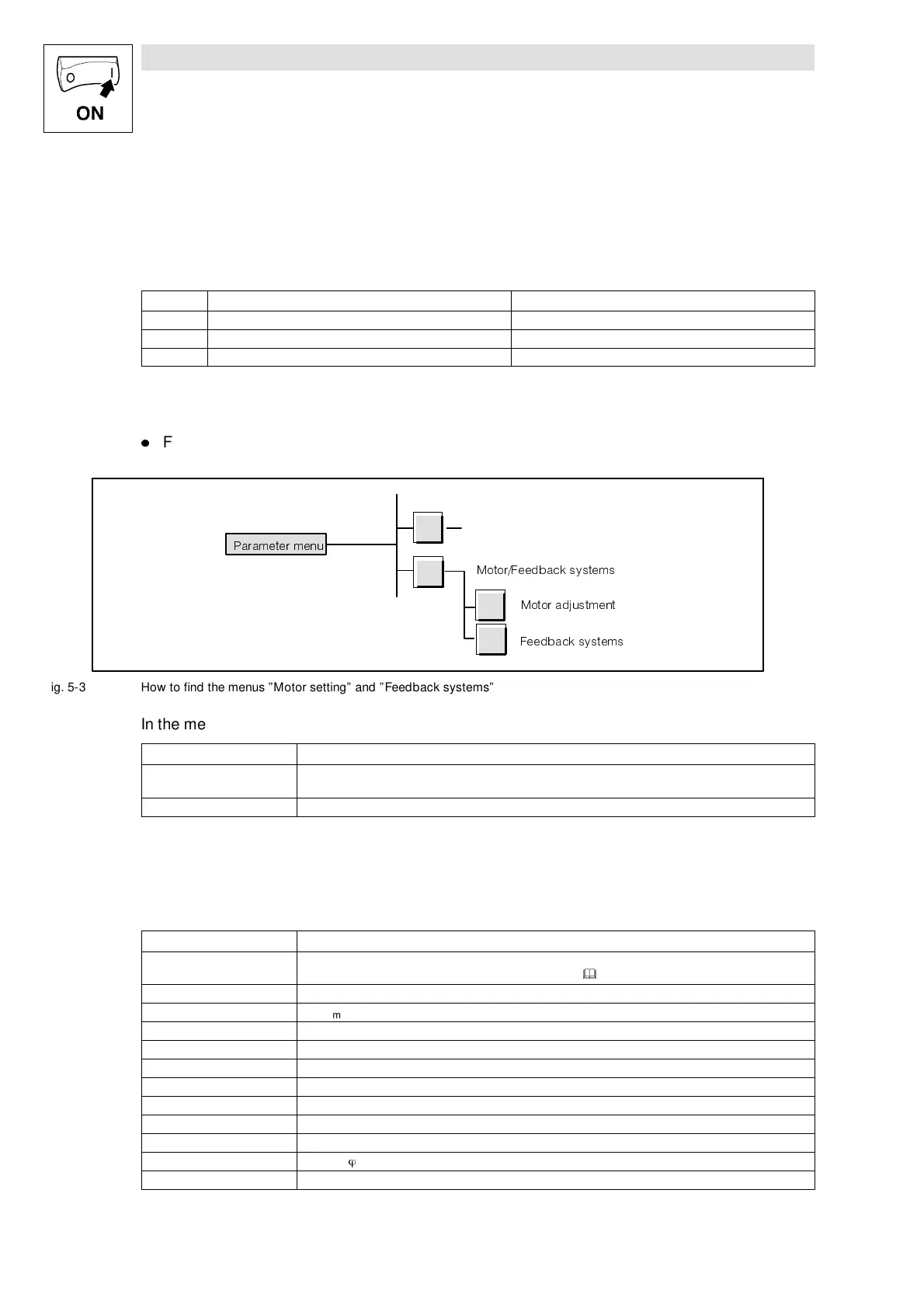
For this change to the parameter menu (see button Fig. 5-3) and select the menu
”Motor/feedback system”.
3DUDPHWHU PHQX
0RWRU)HHGEDFN V\VWHPV
0RWRU DGMXVWPHQW
)HHGEDFN V\VWHPV
Fig. 5-3 How to find the menus ”Motor setting” and ”Feedback systems”
In the menu ”Feedback systems”:
Command Function
Select C0416 Resolver fa ult
Enter value from the motor nameplate
Select C0003 Save data (C0003 = 1).
If you use a motor other than from Lenze:
Change to the menu ”Motor setting” (see Fig. 5-3).
In the menu ”motor setting”:
Command Function
Select C0086 Select a motor which best matches the motor used.
A list of available motors can be obtained from chapter 7.11
(
&
7-327)
.
Select C0006 Operating mode of the motor control
Select C0022 Apapt I
max
to the maximum motor current.
Select C0081 Rated motor power
Select C0084 Stator resistance of the motor (only for very high demands on the control characteristics).
Select C0085 Leakage inductance of the motor (only for very high demands on the control characteristics).
Select C0087 Rated motor speed
Select C0088 Rated motor current
Select C0089 Rated motor frequency
Select C0090 Rated motor voltage
Select C0091 Motor cos
j
.
Select C0003 Save data (C0003 = 1).
 Loading...
Loading...