Logosol Multifunctional Servo Drive LS-231SE
Doc # 712231004 / Rev. A, 05/05/2011
Logosol, Inc. • 1155 Tasman Drive • Sunnyvale, CA 94089 Tel: (408) 744-0974 • www.logosolinc.com
37
COMMAND SPECIFICATION
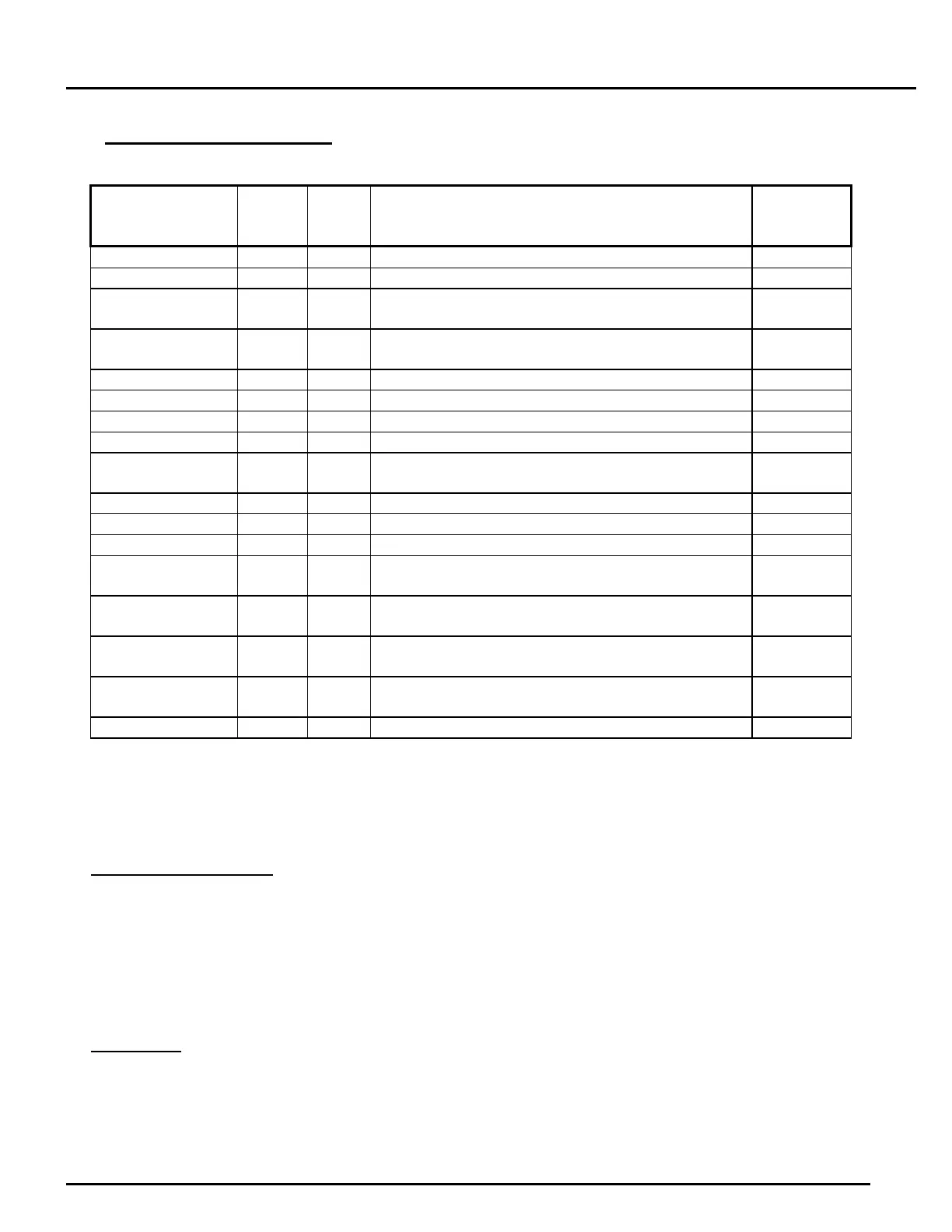
List of Commands
Command CMD
Code
#
Data
bytes
Description While
Moving?
Reset position 0x0 0 Sets position counter to zero No
Set address 0x1 2 Sets the individual and group addresses Yes
Define status 0x2 1-2
Defines which data should be sent in every
status packet
Yes
Read status 0x3 1-2
Causes particular status data to be returned just
once
Yes
Load trajectory 0x4 1-15 Loads motion trajectory parameters Maybe*
Start motion 0x5 0 Executes the previously loaded trajectory Maybe**
Set gain 0x6 14 Sets the PID gains and operating limits Yes
Stop motor 0x7 1 Stops the motor in one of three manners Yes
I/O control 0x8 1
Controls the “Brake out” mode and sets the
path point mode frequency
Yes
Set home mode 0x9 1 Sets conditions for capturing the home position Yes
Set baud rate 0xA 1 Sets the baud rate (group command only) Yes
Clear bits 0xB 0 Clears the sticky status bits Yes
Save as home 0xC 0
Saves the current position in the home position
register
Yes
Add path points 0xD 0-n
Adds up to 7 path points to the device buffer
and starts the path point mode motion
Yes
Nop 0xE 0
Simply causes the defined status data to be
returned
Yes
Extended
commands
0xE 1-n Extended commands (n > 0) No
Hard reset 0xF 0 Resets the controller t o its power-up state. Yes
*Only allowed while moving if the "start motion now" bit of the trajectory control word is not set or if the
"profile mode" bit is set for velocity mode.
**Only allowed while moving if the previously loaded trajectory has the "profile mode" bit set for velocity
mode.
Command Description
Reset Position
Command value: 0x0
Number of data bytes: 0
Command byte: 0x00
Data bytes:
None
Description:
Resets the 32-bit encoder counter to zero. Do not issue this command while executing a trapezoidal
profile motion.