Logosol Multifunctional Servo Drive LS-231SE
Doc # 712231004 / Rev. A, 05/05/2011
Logosol, Inc. • 1155 Tasman Drive • Sunnyvale, CA 94089 Tel: (408) 744-0974 • www.logosolinc.com
24
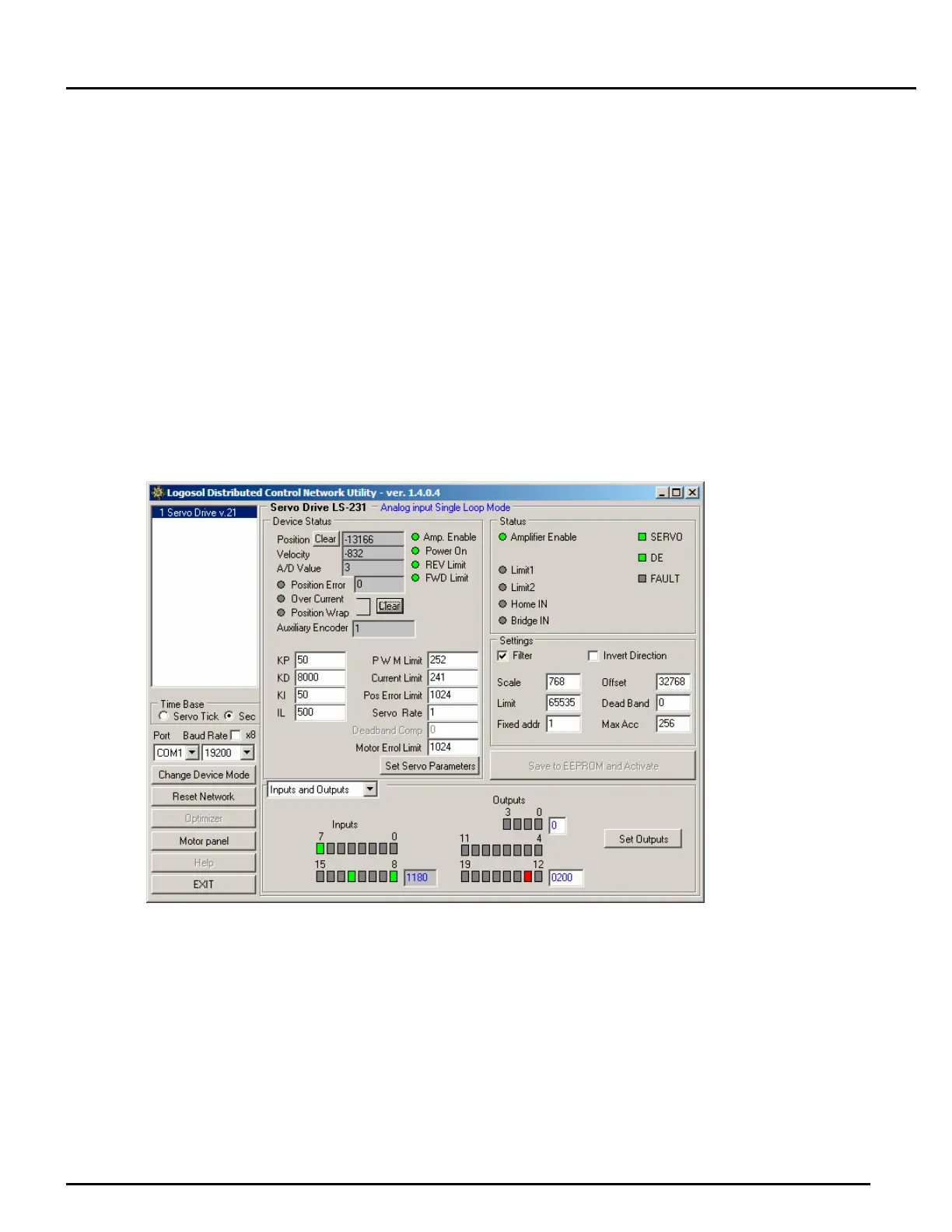
Mode Selection
Various modes can be set using Change Device Mode button. Clicking this button activates a menu
with all possible modes of the controller. After setting the device mode, the PID parameters and all
other mode specific parameters should be set and saved to the non-volatile memory of the drive.
When an analog input mode is selected, set analog input parameters. Filter enables/disables filtering
of the analog input. Invert direction can be used to invert the motor direction. Scale is the factor
used to convert the analog input value (-32768 to 32767) to velocity. For example, scale of 10
produces maximum velocity of 327670 or 97653 encoder counts per second (327670 / 3.3554432 =
97653). The offset determines the zero analog input and is usually set to 32767 – middle of the
whole range. Limit is the maximum analog value. Deadband limits the minimum non-zero value thus
reducing the oscillations at zero velocity. Acceleration value determines how quickly the commanded
velocity will be reached. For example, a value of 256 corresponds to 1,490,116 encoder count/s/s
(256 / 0.00017179869).
In all step modes, the step rate should be set. It represents the factor between steps and encoder
counts.
Fixed address should be set to a value between 1 and 31. It is recommended to use different values
for each drive in the network.