M10P
1
1 Product Profile
1.1 Overview
Based on TOF (time of flight), the M10P lidar can two-dimensionally scan and
detect the environment across 360°. The lidar uses wireless power supply and
wireless communication internally, and the pulse repetition frequency (PRF) is
20KHz. The lidar reaches a measurement accuracy of ±3 cm with a maximum
range of 25 m. With such high performance, the lidar mainly applies to scenarios
that require precise location and obstacle avoidance, including indoor service
robots, AGV, cleaning and sterilization robots, drones, and so on.
1.2 Mechanism
1.2.1 Time of Flight
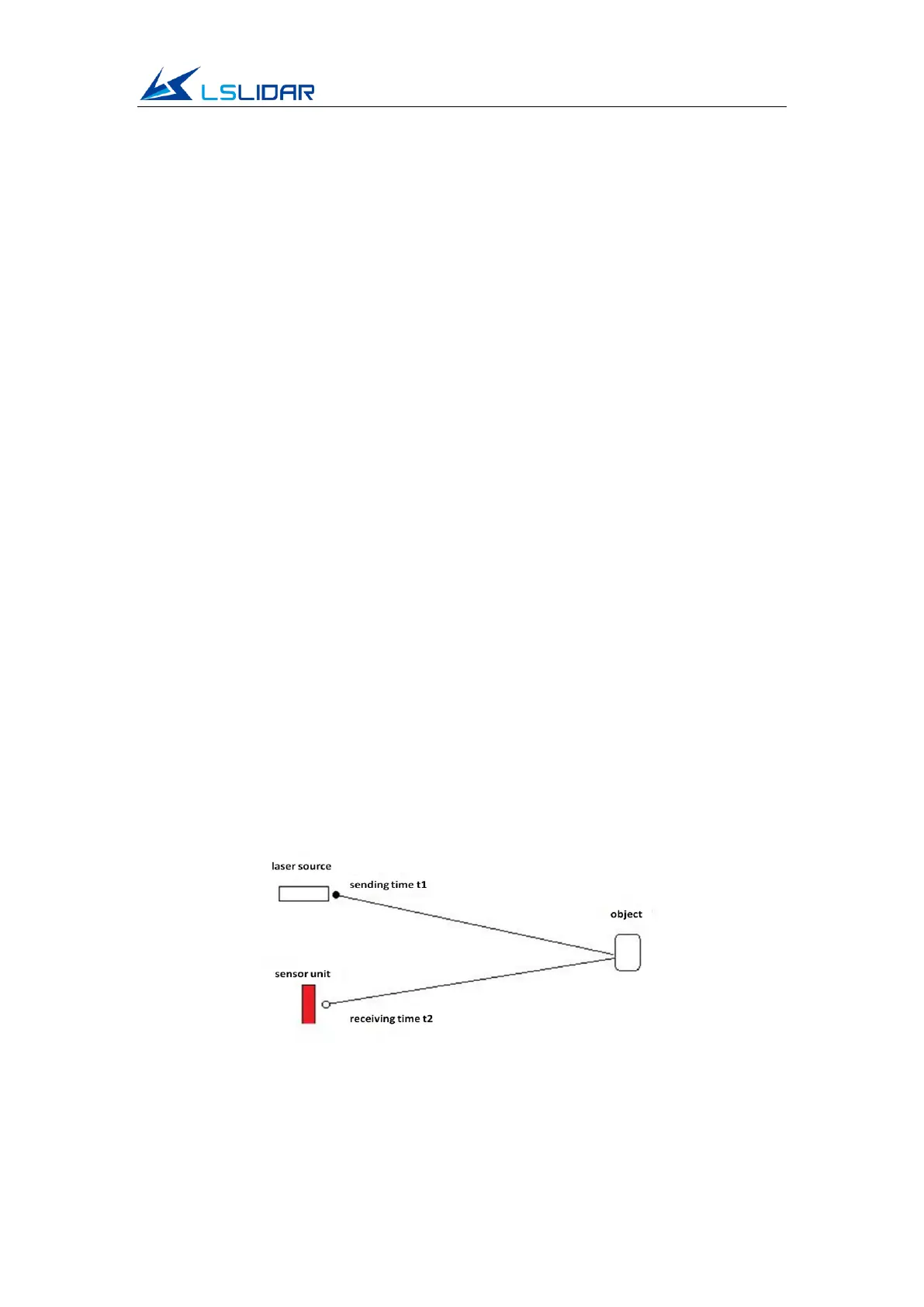
Based on the TOF (time of flight) methodology, the M10P lidar measures the
distance between a target object and the sensor, by calculating the difference
between the emission and return times of modulated laser. The laser emitter
sends out the modulated pulse laser, and an internal timer starts timing(t1). The
laser encounters the target object, part of the energy returns. When the lidar
receives the return laser signal, the timer will stop timing(t2). The formula for
distance between the lidar and the target object:
Distance = Speed of Light*(t2 – t1)/2
Figure 1.1 Mechanism of M10P
1.2.2 Grid Map Presentation
You can get the 2D grid map information of the surrounds across 360° within