Check
of
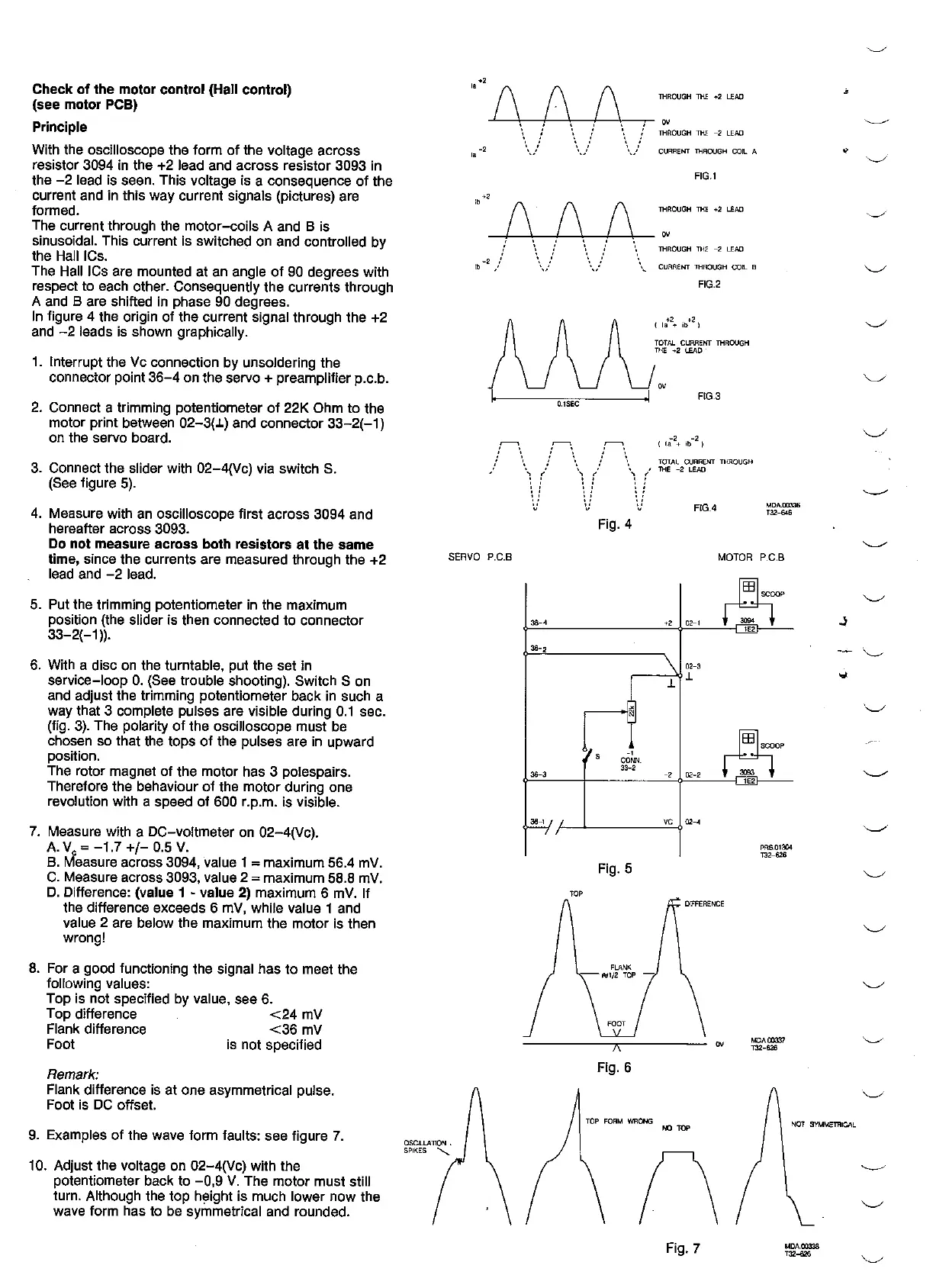
the motor control (Hall control)
(see motor
PCB)
Principle
With the oscilloscope the form of the voltage across
resistor 3094 in the +2 lead and across resistor 3093 in
the
-2
lead is seen. This voltage is a consequence
of
the
current and in this way current signals (pictures) are
formed.
The current through the motor-coils A and B is
sinusoidal. This current is switched on and controlled by
the Hall lCs.
The
Hall
ICs are mounted at
an
angle
of
90 degrees with
respect to each other. Consequently the currents through
A
and
B are shifted
in
phase
90
degrees.
In
figure 4 the origin
of
the current signal through the +2
and
-2
leads
is
shown graphically.
1.
Interrupt the
Vc
connection by unsoldering the
connector point
36-4
on the servo + preamplifier p.c.b.
2.
Connect a trimming potentiometer
of
22K Ohm to the
motor print between
02-3(.1.)
and connector
33-2(-1)
on the servo board.
3.
Connect the slider with 02-4(Vc) via switch
S.
(See
figure
5).
4.
Measure with
an
oscilloscope first across 3094 and
hereafter across 3093.
Do not measure across both resistors
at
the
same
time, since the currents are measured through the +2
lead
and
-2
lead.
5.
Put the trimming potentiometer
in
the maximum
position (the slider is then connected to connector
33-2(-1)).
6.
With a disc
on
the turntable, put the set in
service-loop
0.
(See trouble shooting). Switch S on
and adjust the trimming potentiometer back in such a
way that 3 complete pulses are visible during
0.1
sec.
(fig.
3).
The polarity
of
the oscilloscope must
be
chosen
so
that the tops
of
the pulses are
in
upward
position.
The rotor magnet
of
the motor has 3 polespairs.
Therefore the behaviour
of
the motor during one
revolution with a speed
of
600 r.p.m. is visible.
7. Measure with a DC-voltmeter
on
02-4(Vc).
A.
V,
=
-1.7
+/-
0.5
V.
B.
Measure across 3094, value 1 = maximum 56.4 mv.
C.
Measure across 3093, value 2 = maximum 58.8 mv.
D.
Difference: (value 1 - value 2) maximum 6
mV.
lf
the difference exceeds 6
mV,
while value 1 and
value 2 are below the maximum the motor is then
wrong!
8.
For a good functioning the signal has to meet the
following values:
Top is not specified
by
value, see
6.
Top difference
<24
mV
Flank difference
<36
mV
Foot
is
not specified
Ramark:
Flank difference
is
at one asymmetrical pulse.
Foot
is
DC
offset.
9.
Examples
of
the wave form faults: see figure
7.
10.
Adjust the voltage on 02-4(Vc) with the
potentiometer back to
-0,9
V.
The motor must still
turn. Although the top height is much lower now the
wave form has to
be
symmetrical and rounded.
.,
"
-'!\-.\-,-.J.,/'\_·--1-,
-,1-!\--'-.
__
:°"'"
™'
.,
"'"'
_,
"
\ / \ / \
THROUGH
THE
-2
LEAO
\/
\/
\/
CURRENT
THROUGH
COIL A
FIG.1
lb +
2
/\
/\ /\
THROUGH
THE
+2
LEAD
__j_--1-__j_--1-__,___,__
.,
•
_,
,,/
\,,,,/
\,,,,,/
\,,
THROUGH
THE
-2
LEAO
..,
CUAAENT
îHROUGH
COIL
B
FIG.2
+2 _
+2
(
la
+
1b
)
TOTAL
CURRENT
THROUGH
THE
+2 LEAD
FIG.3
-2
-2
,-----, ,-----, ,-----,
(
la
+ ,b )
/ \
TOTAL
CURRENT
THROUGH
,
\/
'\/
\!'
~,
_,
':~G4
Fig.
4
MOA.003.16
T32-646
SERVO
P.C.B
MOTOR
P.C.B
,._,
.,
,._,
\
J.
•
'1 s
_,
co~
,,_,
,._,
'
~/
"
Fig.
5
Fig.
6
B3
SCOOP
"" -
"'
02-3
J.
,,_,
~oe
>N
DIFFERENCE
.,
"'
PRS01304
T32-626
MOA00337
,,,_.,.
,
.;
"'
TOP
FORM
WRONG
NOT
SYMMETRICAL
OSCILLATIQN.
SPIKES
'
(\
Fig.
7
MDA.00336
"'""'
..___,,
.___,,
'.__/
·-...__,
.,__,,