210
7. Position Control
7.7 Electronic gear settings
7.7 Electronic gear settings
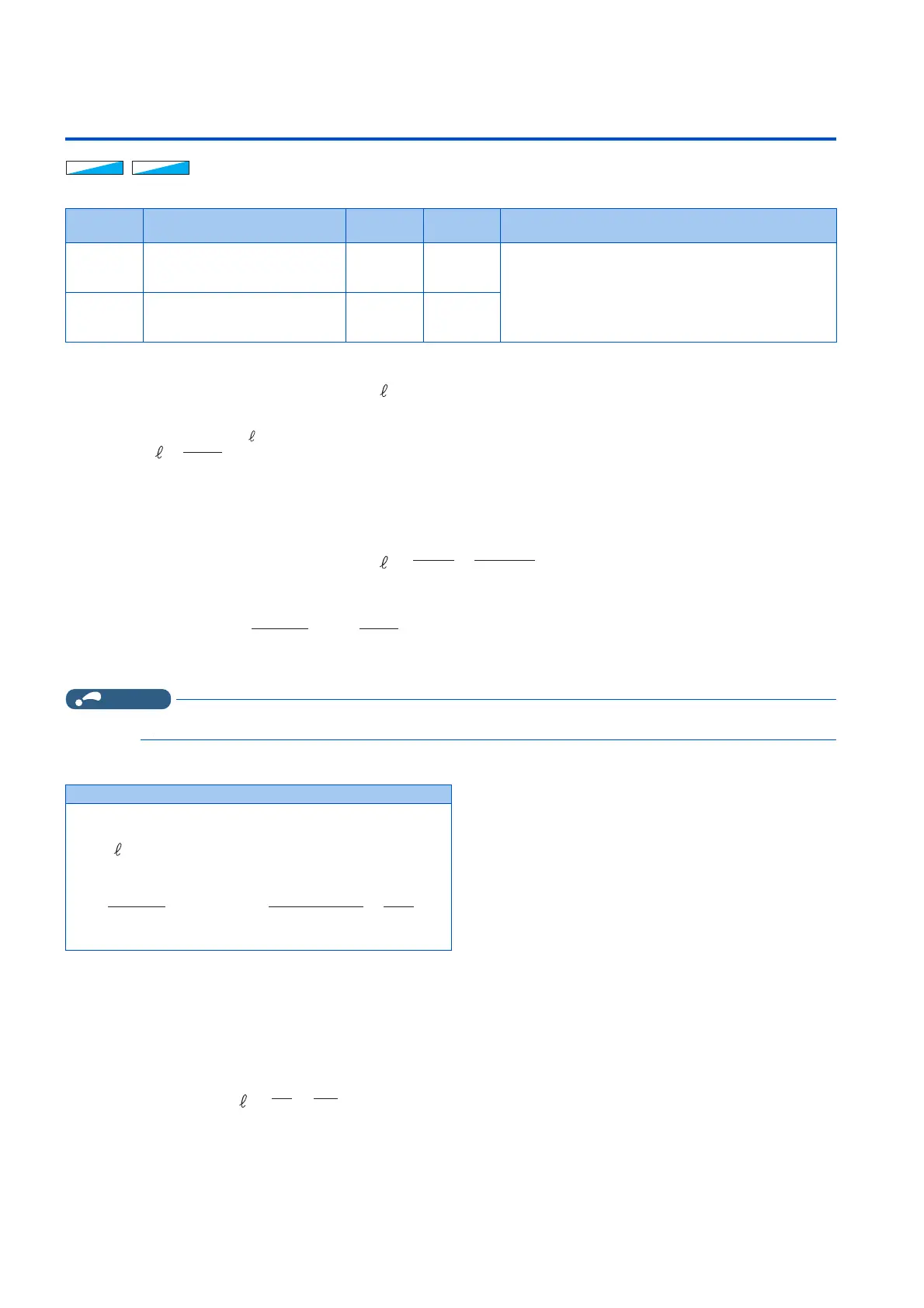
Set the gear ratio between the machine gear and motor gear.
Gear ratio calculation (Pr.420, Pr.421)
The position resolution (travel distance per pulse Δ [mm]) is the travel distance per motor rotation Δs [mm] and the feedback
pulse Pf [pulses/rev] of the detector.
The travel distance in 1 command pulse can be separately specified with a parameter and so an integer can be set as the travel
distance in 1 command pulse.
The following formula shows the relationship between the motor speed and internal command pulse frequency.
• The setting of 1/900 or lower is limited at 1/900, and 900 or higher at 900.
Relationship between the position resolution and system accuracy
The system accuracy (the positioning accuracy of the machine) is the sum of electric deviation and mechanical deviation.
Normally try to prevent the total deviation from being affected by the electronic deviation. Refer to the following relationship as
a reference.
Pr. Name Initial value
Setting
range
Description
420
B001
Command pulse scaling factor
numerator (electronic gear
numerator)
1 1 to 32767
Set the electronic gear. The gear ratio range is from 1/900 to
900.
Pr.420 is the numerator and Pr.421 is the denominator.
421
B002
Command pulse multiplication
denominator (electronic gear
denominator)
1 1 to 32767
Setting example
To set the travel distance per pulse to 0.01 mm in a machine with Δs
= 10 mm while a motor with a 1024 pulse encoder is used.
Thus, set the parameters as follows: Pr.420 = "512", Pr.421 = "125".
=
Δs
Pf
Δ
Δ : Travel distance per pulse [mm]
Δs: Travel distance in one motor rotation [mm]
pf: Number of feedback pulses [pulse/rev] (the number of pulses after the number encoder
pulses is quadruplicated)
=
Δs
×
Pr.420
Pf Pr.421
Δ
fo × = Pf ×
fo: internal command pulse frequency [pulses/s]
No: motor rotation speed [r/min]
Pr.420
Pr.421
No
60
×
4096 pulse/rev
10
= 0.01 mm
Pr.420
Pr.421
512
125
s:10 [mm]
:0.01 [mm]
Pf:4096 [pulse/rev]
=
Δ
< (
1
to
1
)× Δε Δε: positioning accuracy
510

 Loading...
Loading...




