5 - 89
MELSEC-A
5 DATA USED FOR POSITIONING CONTROL
Pr.100
Servo series
Set this parameter to "2: MR-J2-B".
Pr.101
Amplifier setting
Set whether an absolute position detection system is valid or invalid.
When using the servo amplifier in an incremental system, set this parameter to
"0: Absolute position detection invalid".
When using the servo amplifier in an absolute position detection system, set
this parameter to "1: Absolute position detection valid".
Note) A parameter error will occur if "Absolute position detection valid" is
selected for the incremental encoder.
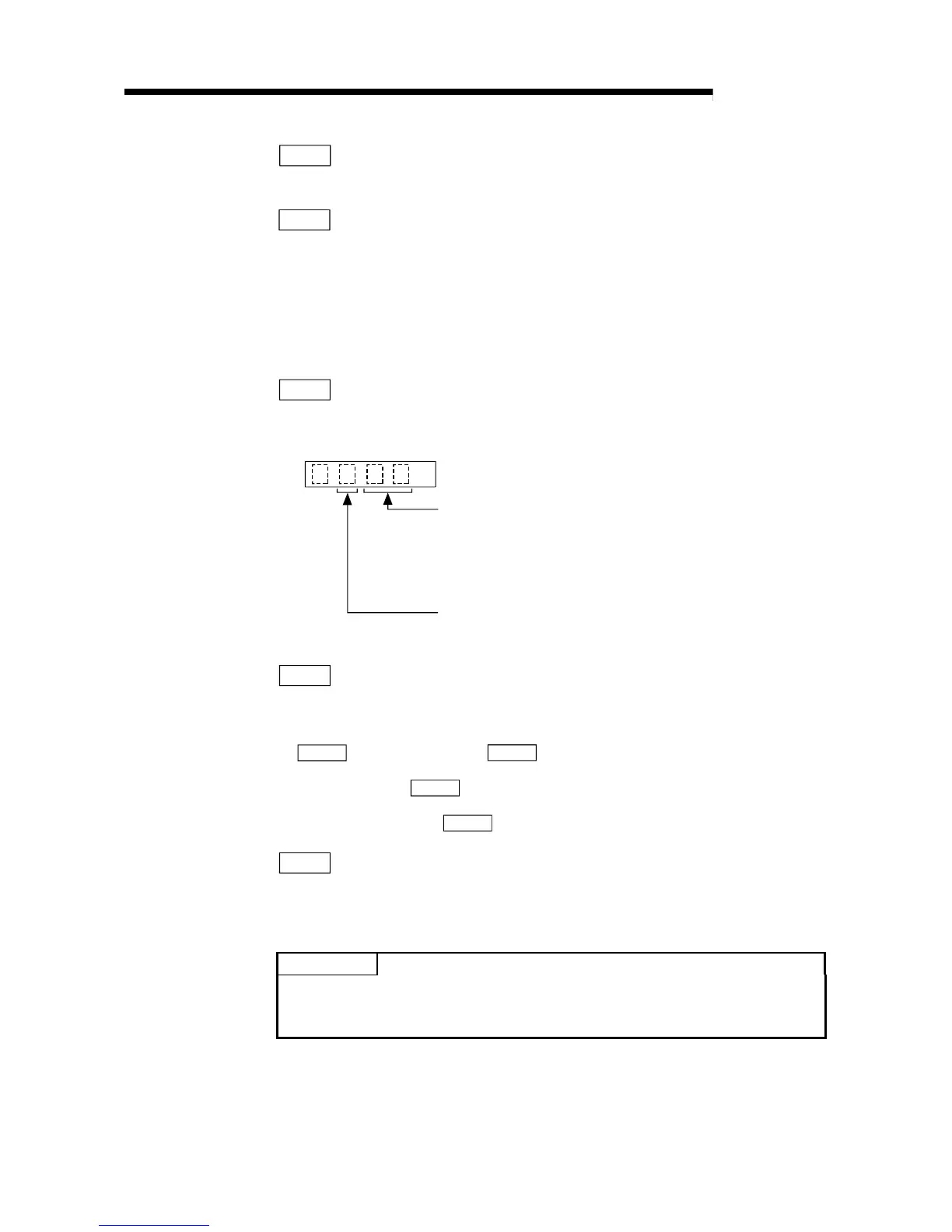
Pr.102
Regenerative brake resister
Select the regenerative brake resistor to be used and whether an external
dynamic brake is valid or invalid.
Regenerative brake option selection
00: External regenerative brake option not used
05: MR-RB32
08: MR-RB30
09: MR-RB50
10: MR-RB032
11: MR-RB12
External dynamic brake valid/invalid selection
0: External dynamic brake invalid
1: External dynamic brake valid
H
0
Pr.103
Motor type
Set "0080
H
".
Since setting is made as the MR-J2-B on the peripheral device, "00FF
H
: Special
motor" can be selected, but set "0080
H
: Automatic setting" (initial setting).
"
Pr.104
Motor capacity" and "
Pr.106
Feedback pulse" are automatically set in the
servo amplifier.
However, set the "
Pr.104
Motor capacity" of the AD75 to other than the initial
value "0".
(Refer to the following "
Pr.104
Motor capacity".)
Pr.104
Motor capacity
Set any of 1 to 9999 in hexadecimal.
The value is automatically set in the servo amplifier according to the used
servomotor.
POINT
Always set the motor capacity to other than "0".
At the default value "0", operation cannot be performed since
communication with the servo amplifier is not made.

 Loading...
Loading...







