5 - 88
MELSEC-A
5 DATA USED FOR POSITIONING CONTROL
5.2.10 Servo parameters for MR-J2S-B
When using the servo amplifier MR-J2Super (Model MR-J2S- B), set the servo
series to the "MR-J2-B" on the peripheral device.
For the items and ranges that cannot be set as the MR-J2-B, set them in a sequence
program (refer to section "6.4 Positioning program examples").
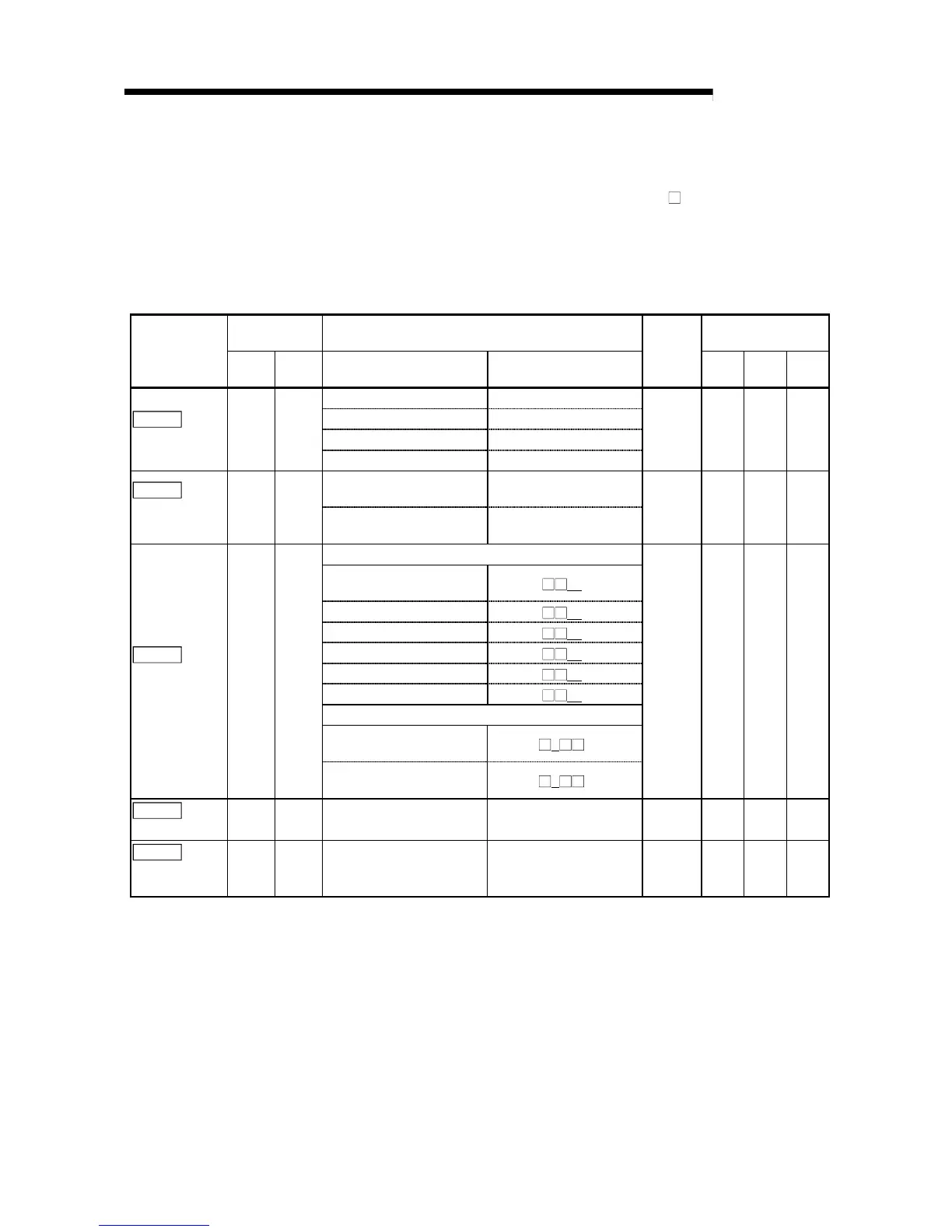
(1) Servo basic parameters
Servo amplifier
side parameter
Setting value, setting range
Setting value buffer
memory address
Item
No.
Abbre-
viation
Value set with peripheral
device
Value set with sequence
program
Default
value
Axis 1 Axis 2 Axis 3
0 : MR-H-B(MR-H-BN) 0000
H
1 : MR-J-B 0001
H
2 : MR-J2-B 0002
H
Pr.100
Servo series
– –
3 : Other 001E
H
0000
H
100 250 400
0 : Absolute position
detection invalid
0
Pr.101
Amplifier
setting
No.1 *AMS
1 : Absolute position
detection valid
1
0 101 251 401
Regenerative brake option
00 : External regenerative
brake option not used
00
H
05 : MR-RB32
05
H
08 : MR-RB30
08
H
09 : MR-RB50
09
H
10 : MR-RB032
10
H
11 : MR-RB12
11
H
External dynamic brake selection
0 : External dynamic brake
invalid
0
H
Pr.102
Regenerative
brake resister
No.2 *REG
1 : External dynamic brake
valid
1
H
0000
H
102 252 402
Pr.103
Motor type
No.3 *MTY 0080
H
: Automatic setting 0080
H
0000
H
103 253 403
Pr.104
Motor
capacity
No.4 *MCA 1 to 9999 1 to 9999
H
0000
H
104 254 404
* This parameter is made valid when the servo amplifier is powered OFF, then ON again after it has been transferred
from the AD75 to the servo amplifier.

 Loading...
Loading...







