6 - 5
MELSEC-A
6 SEQUENCE PROGRAM USED FOR POSITIONING CONTROL
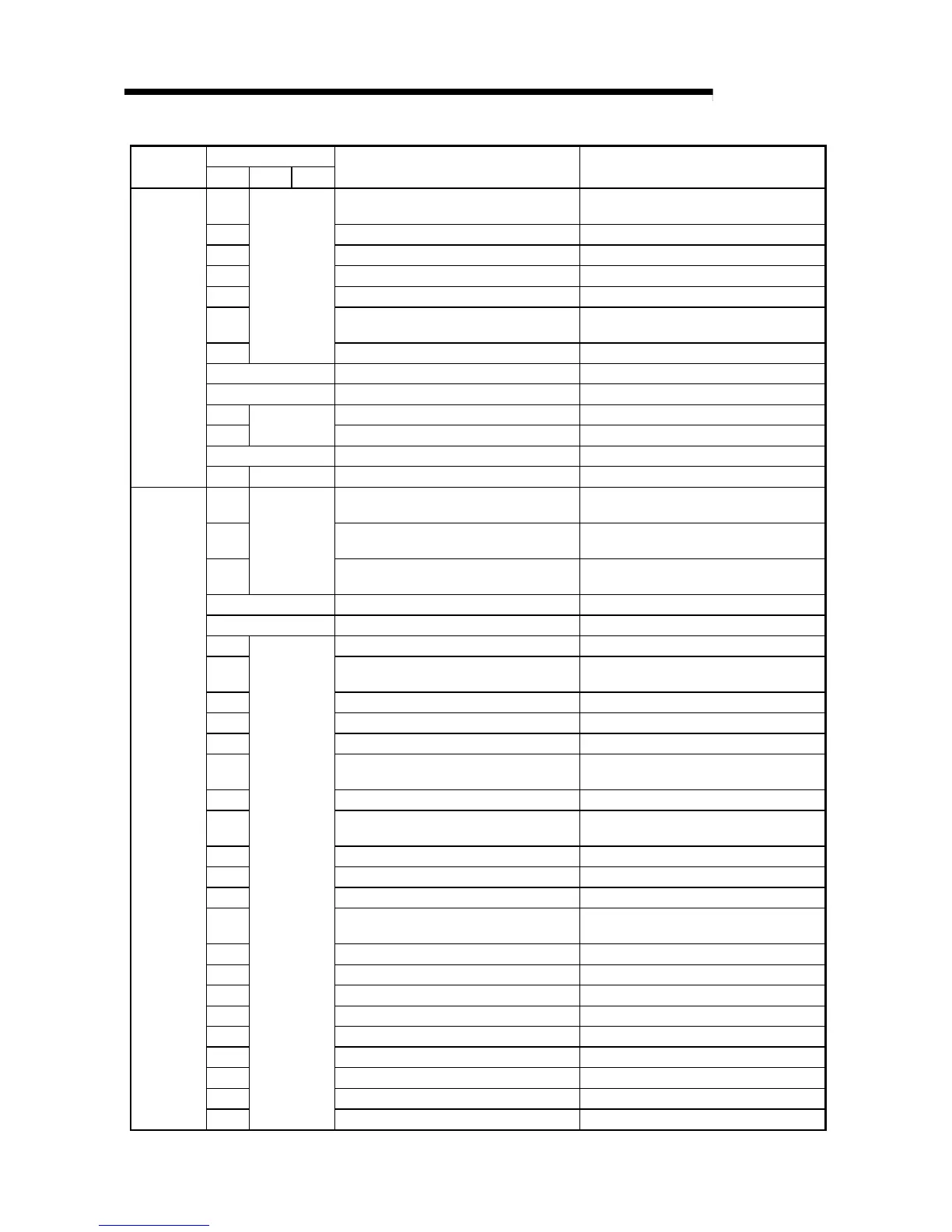
Device
Device
name
Axis 1 Axis 2 Axis 3
Application Details when ON
X35
Acceleration/deceleration time change
disable command
Commanding acceleration/deceleration
time change disable
X36 Torque change command Commanding torque change
X37 Step operation command Commanding step operation
X38 Skip command Commanding skip
X39 Teaching command Commanding teaching
X3A Continuous operation interrupt command
Commanding continuous operation
interrupt
X3B
–
Restart command Commanding restart
X3C Parameter initialization command Commanding parameter initialization
X3D Flash ROM write command Commanding flash ROM write
X3E Error reset command Commanding error reset
X3F
–
Stop command Commanding stop
X40 All axes servo OFF command All axes servo OFF
Command
X41 – Axis 1 servo OFF command Axis 1 servo OFF
M0 Zero point return request OFF command
Commanding zero point return request
OFF
M1
Zero point return request OFF command
pulse
Zero point return request OFF
commanded
M2
–
Zero point return request OFF command
storage
Zero point return request OFF command
held
M3 Clock data write command pulse Clock data write commanded
M4 Clock data write command storage Clock data write command held
M5 High-speed zero point return command Requesting high-speed zero point return
M6
High-speed zero point return command
storage
High-speed zero point return command
held
M7 Positioning start command pulse Positioning start commanded
M8 Positioning start command storage Positioning start command held
M9 In JOG flag In JOG flag
M10
Manual pulse generator operation enable
command
Requesting manual pulse generator
operation enable
M11 Manual pulse generator operating flag Manual pulse generator operating flag
M12
Manual pulse generator operation disable
command
Requesting manual pulse generator
operation disable
M13 Speed change command pulse Speed change commanded
M14 Speed change command storage Speed change command held
M15 Override command Requesting override
M16
Acceleration/deceleration time change
command
Requesting acceleration/deceleration time
change
M17 Torque change command Requesting torque change
M18 Step operation command pulse Step operation commanded
M19 Skip operation command pulse Skip operation commanded
M20 Skip operation command storage Skip operation command held
M21 Teaching command pulse Teaching commanded
M22 Teaching command storage Teaching command held
M23 Continuous operation interrupt command Requesting continuous operation interrupt
M24 Restart command Requesting restart
Internal
relay
M25
–
Restart command storage Restart command held

 Loading...
Loading...







