Complete dimensioning solution - EXAMPLE
Dynamic Rotation - Example
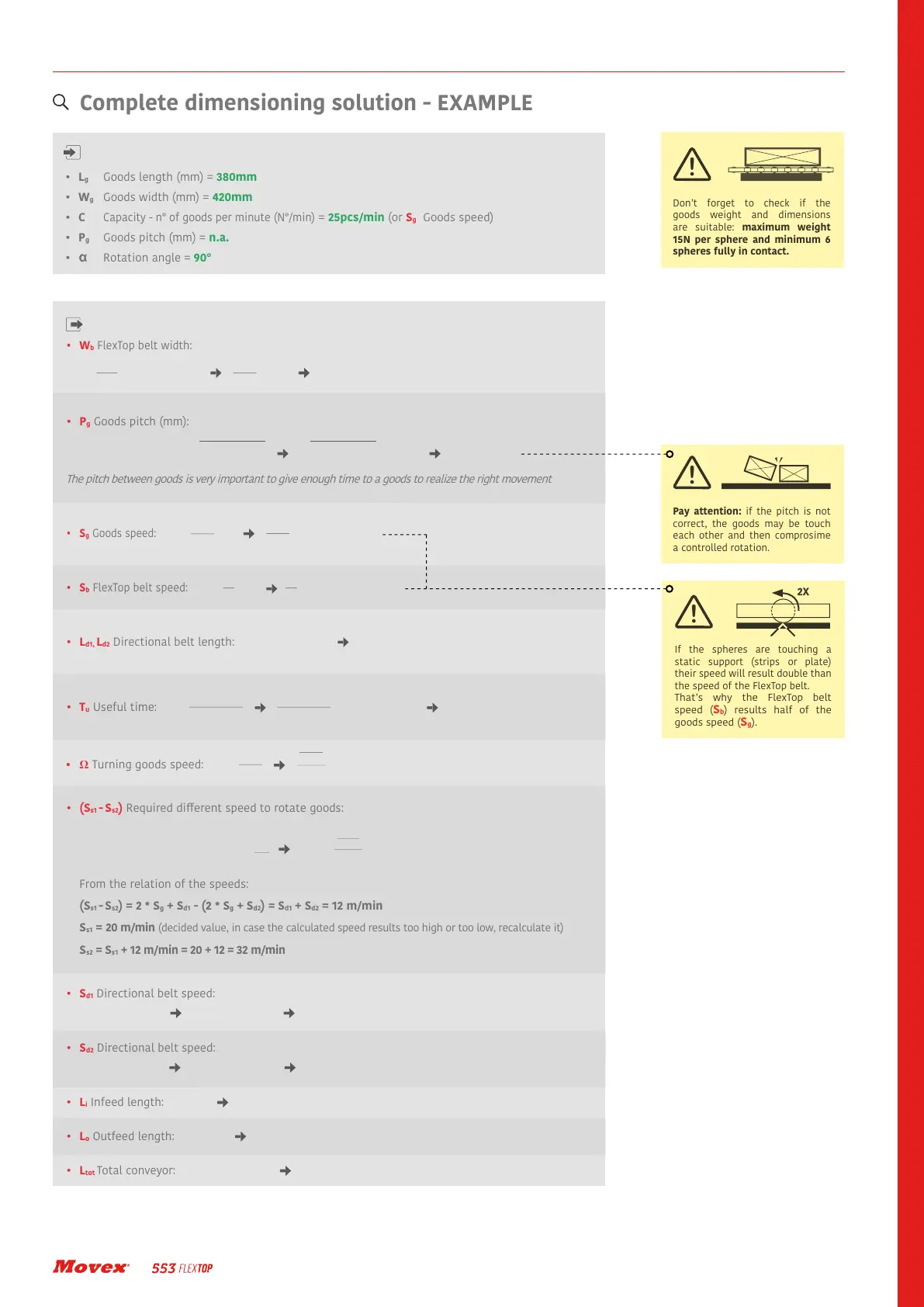
If the spheres are touching a
static support (strips or plate)
their speed will result double than
the speed of the FlexTop belt.
That’s why the FlexTop belt
speed (
S
b
) results half of the
goods speed (S
g
).
ENGINEERING MANUAL
27
• W
b
FlexTop belt width:
• P
g
Goods pitch (mm):
T
he pitch between goods is very important to give enough time to a goods to realize the right movement
• S
g
Goods speed:
• S
b
FlexTop belt speed:
• L
d1,
L
d2
Directional belt length:
• T
u
Useful time:
• Ω Turning goods speed:
• (S
s1
-
S
s2
)
Required dierent speed to rotate goods:
From the relation of the speeds:
(S
s1
-
S
s2
) = 2 * S
g
+ S
d1
- (2 * S
g
+ S
d2
) = S
d1
+ S
d2
= 12 m/min
S
s1
=
20 m/min
(decided value, in case the calculated speed results too high or too low, recalculate it)
S
s2
=
S
s1
+ 12 m/min = 20 + 12 = 32 m/min
• S
d1
Directional belt speed:
• S
d2
Directional belt speed:
• L
i
Infeed length:
• L
o
Outfeed length:
• L
tot
Total conveyor:
S
s1
=
2 * S
g
+ S
d1
S
d1
= S
s1
- 2 * S
g
20 - (2 * 7,5) = 5 m/min
S
b
=
* S
g
* 15 = 7,5 m/min
1,5 * D 1,5 * 600 = 900mm
L
d1,
L
d2
=
S
s2
=
2 * S
g
- S
d2
S
d2
= S
s2
- 2 * S
g
32 - (2 * 7,5) = 17 m/min
Goods length (mm) = 380mm
Goods width (mm) = 420mm
Capacity - n° of goods per minute (N°/min)
= 25pcs/min (or S
g
Goods speed)
Goods pitch (mm) = n.a.
Rotation angle = 90°
P
g
= = 566,4 600mm
L
g
2
+ W
g
2
380
2
+ 420
2
√ √
Ω =
= 0,44 rad/s = 26 rad/min
α
T
u
3,6
π
2
L
i
= L
g
380 mm
L
d
1000 * S
g
900
1000 * 15
T
u
=
= 0,06 min * 60
3,6 s
L
o
= W
g
420 mm
L
tot
= L
i
+ L
o
+ L
d
380 + 420 + 900 = 1.700 mm
Pay attention: if the pitch is not
correct, the goods may be touch
each other and then comprosime
a controlled rotation.
(S
s1
-
S
s2
) 0,44 *
= Ω
*
900
2
1000
P
g
2
= 0,2 m/s = 12 m/min
600
1000
P
g
1000
S
g
=
C 25 = 15 m/min
* *
Inputs:
W
b
≥
420
76,2
W
g
76,2
= 5,51 6 * 76,2 = 457,2mm (Belt width 18” – Art. Nr 5530270018A)
to catalog width
1
2
1
2
Don’t forget to check if the
goods weight and dimensions
are suitable: maximum weight
15N per sphere and minimum 6
spheres fully in contact.
Outputs: