Machine Automation Controller NX1
23
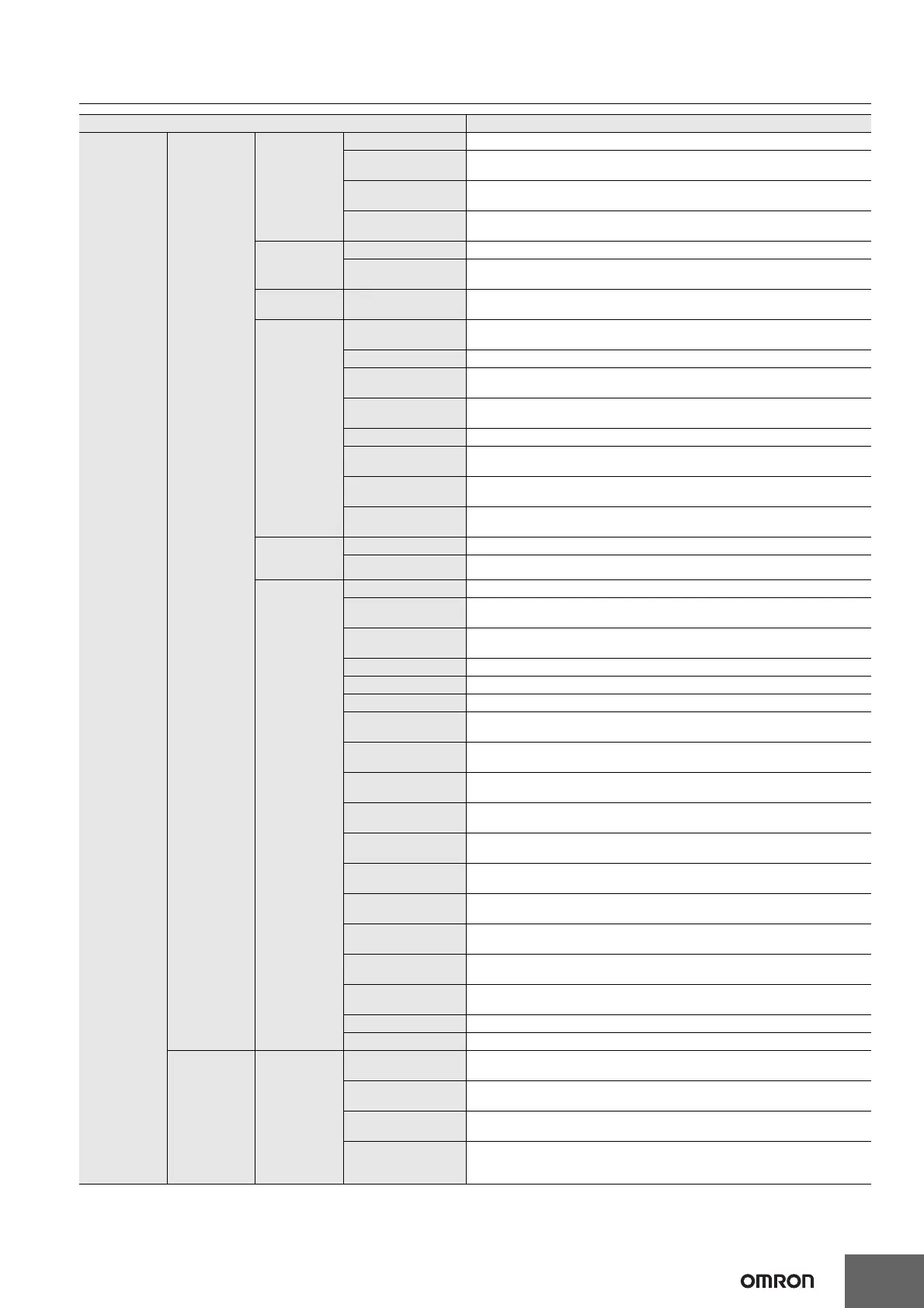
Motion control
Single axes
Single-axis
position
control
Absolute positioning Positioning is performed for a target position that is specified with an absolute value
Relative positioning
Positioning is performed for a specified travel distance from the command current
position
Interrupt feeding
Positioning is performed for a specified travel distance from the position where an
interrupt input was received from an external input
Cyclic synchronous
absolute positioning
A positioning command is output each control period in Position Control Mode
Single-axis
velocity
control
Velocity control Velocity control is performed in Position Control Mode
Cyclic synchronous
velocity control
A velocity command is output each control period in Velocity Control Mode
Single-axis
torque control
Torque control The torque of the motor is controlled
Single-axis
synchronized
control
Starting cam
operation
A cam motion is performed using the specified cam table
Ending cam operation The cam motion for the axis that is specified with the input parameter is ended
Starting gear
operation
A gear motion with the specified gear ratio is performed between a master axis and
slave axis
Positioning gear
operation
A gear motion with the specified gear ratio and sync position is performed between
a master axis and slave axis
Ending gear operation The specified gear motion or positioning gear motion is ended
Synchronous
positioning
Positioning is performed in sync with a specified master axis
Master axis phase
shift
The phase of a master axis in synchronized control is shifted
Combining axes
The command positions of two axes are added or subtracted and the result is output
as the command position
Single-axis
manual
operation
Powering the Servo The Servo in the Servo Drive is turned ON to enable axis motion
Jogging An axis is jogged at a specified target velocity
Auxiliary
functions for
single-axis
control
Resetting axis errors Axes errors are cleared
Homing
A motor is operated and the limit signals, home proximity signal, and home signal
are used to define home
Homing with
parameter
The parameters are specified, the motor is operated, and the limit signals, home
proximity signal, and home signal are used to define home
High-speed homing Positioning is performed for an absolute target position of 0 to return to home
Stopping An axis is decelerated to a stop
Immediately stopping An axis is stopped immediately
Setting override
factors
The target velocity of an axis can be changed
Changing the current
position
The command current position or actual current position of an axis can be changed
to any position.
Enabling external
latches
The position of an axis is recorded when a trigger occurs
Disabling external
latches
The current latch is disabled
Zone monitoring
You can monitor the command position or actual position of an axis to see when it
is within a specified range (zone)
Enabling digital cam
switches
You can turn a digital output ON and OFF according to the position of an axis
Monitoring axis
following error
You can monitor whether the difference between the command positions or actual
positions of two specified axes exceeds a threshold value
Resetting the
following error
The error between the command current position and actual current position is set
to 0
Torque limit
The torque control function of the Servo Drive can be enabled or disabled and the
torque limits can be set to control the output torque
Command position
compensation
The function which compensates the position for the axis in operation
Cam monitor Outputs the specified offset position for the slave axis in synchronous control.
Start velocity You can set the initial velocity when axis motion starts
Axes groups
Multi-axes
coordinated
control
Absolute linear
interpolation
Linear interpolation is performed to a specified absolute position
Relative linear
interpolation
Linear interpolation is performed to a specified relative position
Circular 2D
interpolation
Circular interpolation is performed for two axes
Axes group cyclic
synchronous
absolute positioning
A positioning command is output each control period in Position Control Mode
Item NX102

 Loading...
Loading...





