Machine Automation Controller NX1
24
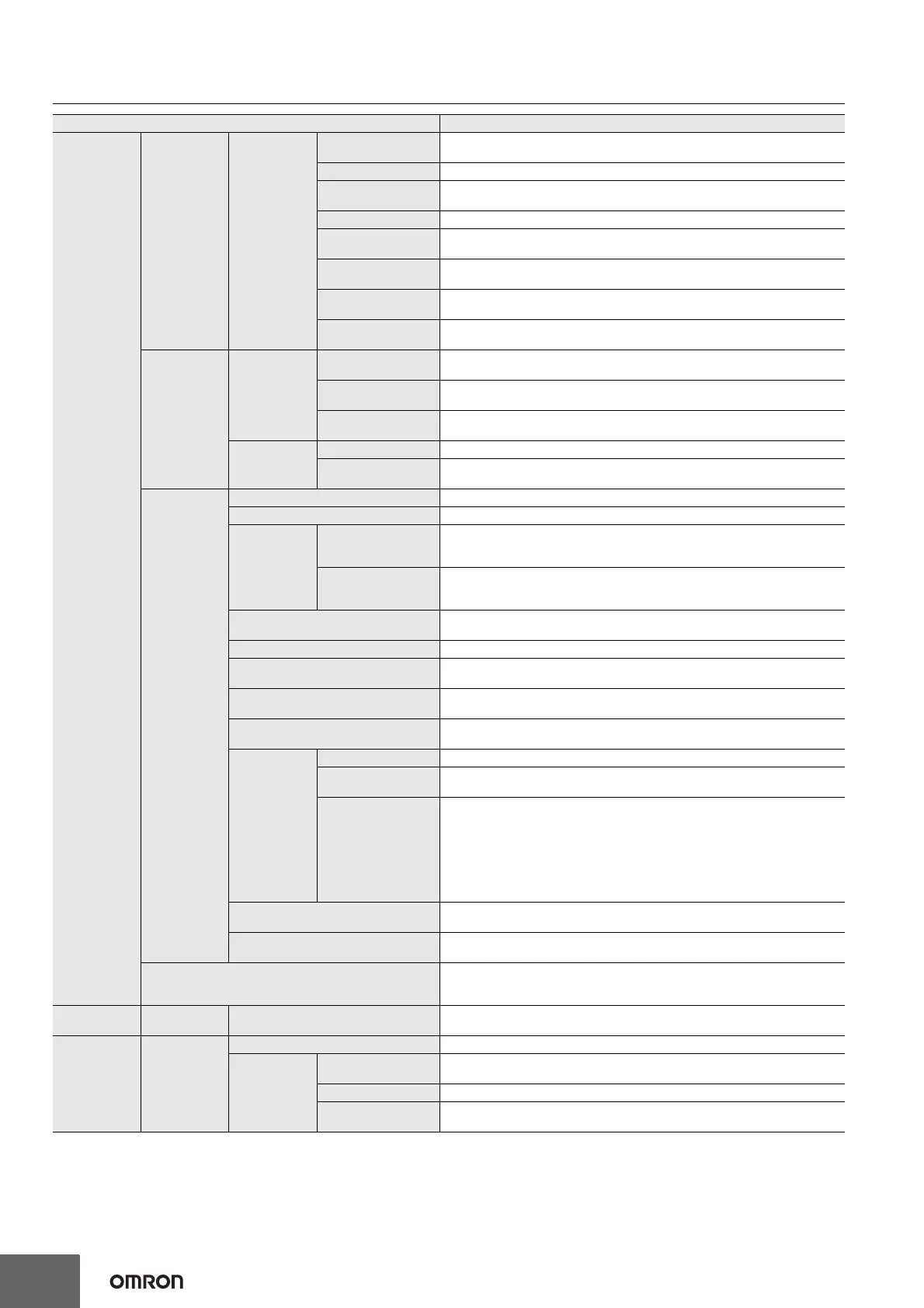
Motion control
Axes groups
Auxiliary
functions for
multi-axes
coordinated
control
Resetting axes group
errors
Axes group errors and axis errors are cleared
Enabling axes groups Motion of an axes group is enabled
Disabling axes
groups
Motion of an axes group is disabled
Stopping axes groups All axes in interpolated motion are decelerated to a stop
Immediately stopping
axes groups
All axes in interpolated motion are stopped immediately
Setting axes group
override factors
The blended target velocity is changed during interpolated motion
Reading axes group
positions
The command current positions and actual current positions of an axes group can
be read
Changing the axes in
an axes group
The Composition Axes parameter in the axes group parameters can be overwritten
temporarily
Common items
Cams
Setting cam table
properties
The end point index of the cam table that is specified in the input parameter is
changed
Saving cam tables
The cam table that is specified with the input parameter is saved in non-volatile
memory in the CPU Unit
Generating cam
tables
The cam table is generated from the cam property and cam node that is specified
in input parameters
Parameters
Writing MC settings Some of the axis parameters or axes group parameters are overwritten temporarily
Changing axis
parameters
The axis parameters can be accessed or changed from the user program
Auxiliary
functions
Count modes You can select either Linear Mode (finite length) or Rotary Mode (infinite length).
Unit conversions You can set the display unit for each axis according to the machine
Acceleration/
deceleration
control
Automatic
acceleration/
deceleration control
Jerk is set for the acceleration/deceleration curve for an axis motion or axes group
motion
Changing the
acceleration and
deceleration rates
You can change the acceleration or deceleration rate even during acceleration or
deceleration
In-position check
You can set an in-position range and in-position check time to confirm when posi-
tioning is completed
Stop method You can set the stop method to the immediate stop input signal or limit input signal
Re-execution of motion control
instructions
You can change the input variables for a motion control instruction during execution
and execute the instruction again to change the target values during operation
Multi-execution of motion control
instructions (Buffer Mode)
You can specify when to start execution and how to connect the velocities between
operations when another motion control instruction is executed during operation
Continuous axes group motions
(Transition Mode)
You can specify the Transition Mode for multi-execution of instructions for axes
group operation
Monitoring
functions
Software limits The movement range of an axis is monitored
Following error
The error between the command current value and the actual current value is mon-
itored for each axis
Velocity, acceleration
rate, deceleration
rate, torque,
interpolation velocity,
interpolation
acceleration rate,
interpolation
deceleration rate
You can set and monitor warning values for each axis and each axes group
Absolute encoder support
You can use an OMRON 1S-series Servomotor or G5-series Servomotor with an
Absolute Encoder to eliminate the need to perform homing at startup
Input signal logic inversion
You can inverse the logic of immediate stop input signal, positive limit input signal,
negative limit input signal, or home proximity input signal
External interface signals
The Servo Drive input signals listed below are used.
Home signal, home proximity signal, positive limit signal, negative limit signal, im-
mediate stop signal, interrupt input signal
Unit (I/O)
management
EtherCAT
slaves
Maximum number of slaves 64
Communications
Built-in
EtherNet/IP
port
Communications protocol TCP/IP, UDP/IP
TCP/IP
functions
CIDR
The function which performs IP address allocations without using a class (class A
to C) of IP address
IP Forwarding The function which forwards IP packets between interfaces
Packet Filter
The function which checks the IP packet to determine whether to receive and send
it based on the source IP address and TCP port number
Item NX102

 Loading...
Loading...





