5 - 21
5 EtherCAT Communications
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
5-9 Cable Redundancy Function
5
5-9-3 Procedure of Checking Operation
The ring disconnection status may have resulted not because an EtherCAT communications cable is
disconnected, but because a communications cable is broken or short-circuited, or because a Servo
Drive broke down. If the ring disconnection status occurs, immediately perform inspection and take
appropriate measures. Refer to 13-4 Method for Broken Ring Maintenance and Inspection on page
13-5 for details on the inspection method.
After the ring disconnection status occurs because a communications cable is broken or short-circuited,
or because a Servo Drive broke down, continuing to use the devices as they are may stop the entire
communications system.
Precautions for Correct Use
If the ring disconnection status occurs, immediately perform inspection and take appropriate
measures. Equipment damage may result.
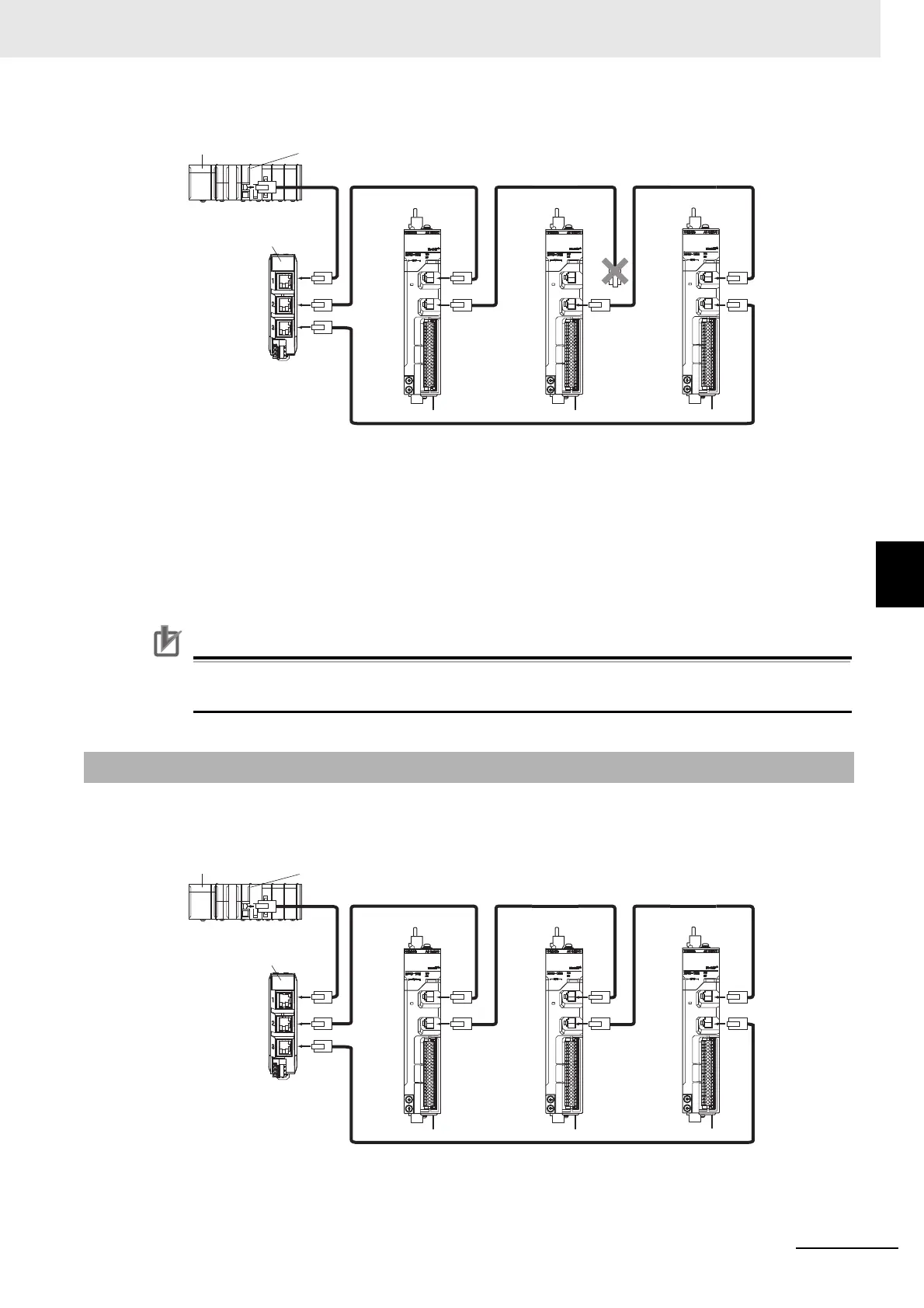
This section takes the following configuration example and describes how to check that the cable
redundancy function operates correctly.
5-9-3 Procedure of Checking Operation
Servo Drive A Servo Drive B Servo Drive C
L1 L2 L4
L5
L3
Power supply unit
NJ/NX-series
CPU Unit
IN
X2
X3
EtherCAT
Junction Slave
RUN IN OUT
FS
L/A L/A
ERR
RUN IN OUT
FS
L/A L/A
ERR
RUN IN OUT
FS
L/A L/A
ERR
L1 L2 L4
L5
L3
IN
X2
X3
Servo Drive A Servo Drive B Servo Drive C
Power supply unit
NJ/NX-series
CPU Unit
EtherCAT
Junction Slave
RUN IN OUT
FS
L/A L/A
ERR
RUN IN OUT
FS
L/A L/A
ERR
RUN IN OUT
FS
L/A L/A
ERR
 Loading...
Loading...

