6
6-11
6-4 Electronic Gear Function
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
Applied Functions
Electronic Gear Ratio Setting (Pn008, Pn009, Pn010)
* The encoder resolution is set as the numerator for fully-closed control. The command pulse is the
external encoder reference for fully-closed control. Accordingly, please be cautious that the Pn008
set value will not be the number of command pulses per motor rotation.
Electronic
Gear
Integer
Setting
(Pn008)
Electronic
Gear Ratio
Numerator 1
(Pn009)
Electronic
Gear Ratio
Denominator
(Pn010)
Explanation
1 to
1048576
−−
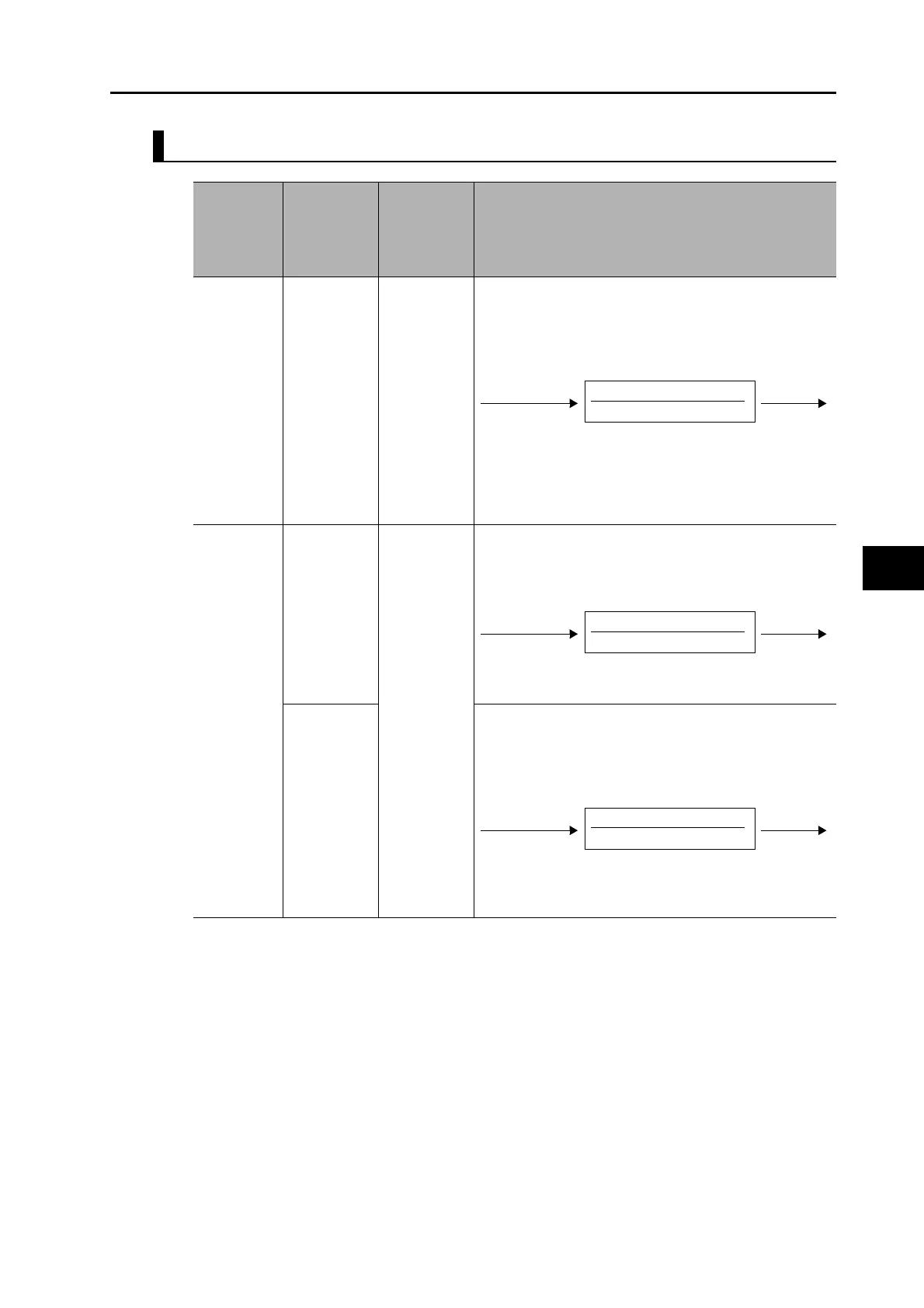
When the Electronic Gear Integer Setting (Pn008) ≠ 0
The processing will be based on the set value of
Electronic Gear Integer Setting (Pn008) regardless of the
set values of Electronic Gear Ratio Numerator 1 (Pn009)
and Electronic Gear Ratio Denominator (Pn010).
Position command pulse = Encoder resolution /
Electronic Gear Integer Setting (Pn008)
Switching among electronic gear ratio numerators 1 to 4
is disabled when the Electronic Gear Integer Setting
(Pn008) ≠ 0.
0
0
1 to
1073741824
When the Electronic Gear Integer Setting (Pn008) = 0, or
Electronic Gear Ratio Numerator 1 (Pn009) = 0
The processing will be based on the set value of
Electronic Gear Ratio Denominator (Pn010).
Position command pulse = Encode resolution / Electronic
Gear Ratio Denominator (Pn010)
1 to
1073741824
When the Electronic Gear Integer Setting (Pn008) = 0, or
Electronic Gear Ratio Numerator 1 (Pn009) ≠ 0
The processing will be based on the set values of
Electronic Gear Ratio Numerator 1 (Pn009) and
Electronic Gear Ratio Denominator (Pn010).
Position command pulse = Electronic Gear Ratio
Numerator 1 (Pn009) / Electronic Gear Ratio
Denominator (Pn010)
Command pulse input
Encoder resolution *
Electronic Gear Integer Setting (Pn008)
Position
command
Command pulse input
Encoder resolution *
Electronic Gear Ratio Denominator (Pn010)
Position
command
Command pulse input
Electronic Gear Ratio Numerator 1 (Pn009)
Electronic Gear Ratio Denominator (Pn010)
Position
command
 Loading...
Loading...