8-12
8-2 Gain Parameters
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
8
Parameter Details
Set the feed-forward amount. Increasing the set value decreases the position error and increases
the responsiveness. Overshooting, however, will occur more easily.
Set the time constant for the first-order lag filter inserted into the feed forward.
Setting the filter may improve operation if speed overshooting occurs or the noise during operation
is large when the feed-forward is set high.
Set the feed-forward amount in the torque loop. Increasing the set value decreases the position
error and increases the responsiveness. Overshooting, however, will occur more easily.
Set the time constant for the first-order lag filter inserted into the feed forward.
Setting the filter may improve operation if speed overshooting occurs or the noise during operation
is large when the feed-forward is set high.
Explanation of Set Values
Select either PI/P operation switching or gain 1/gain 2 switching.
PI/P operation switching is performed using gain switching (GSEL: CN1 pin 27). PI is not changed,
however, if the Torque Limit Selection (Pn521) is set to 3.
For information on switching conditions between gain 1 and gain 2, refer to "6-7 Gain Switching
Function" (P.6-24).
If autotuning is enabled, feedforward gain and filter are set at a fixed value.
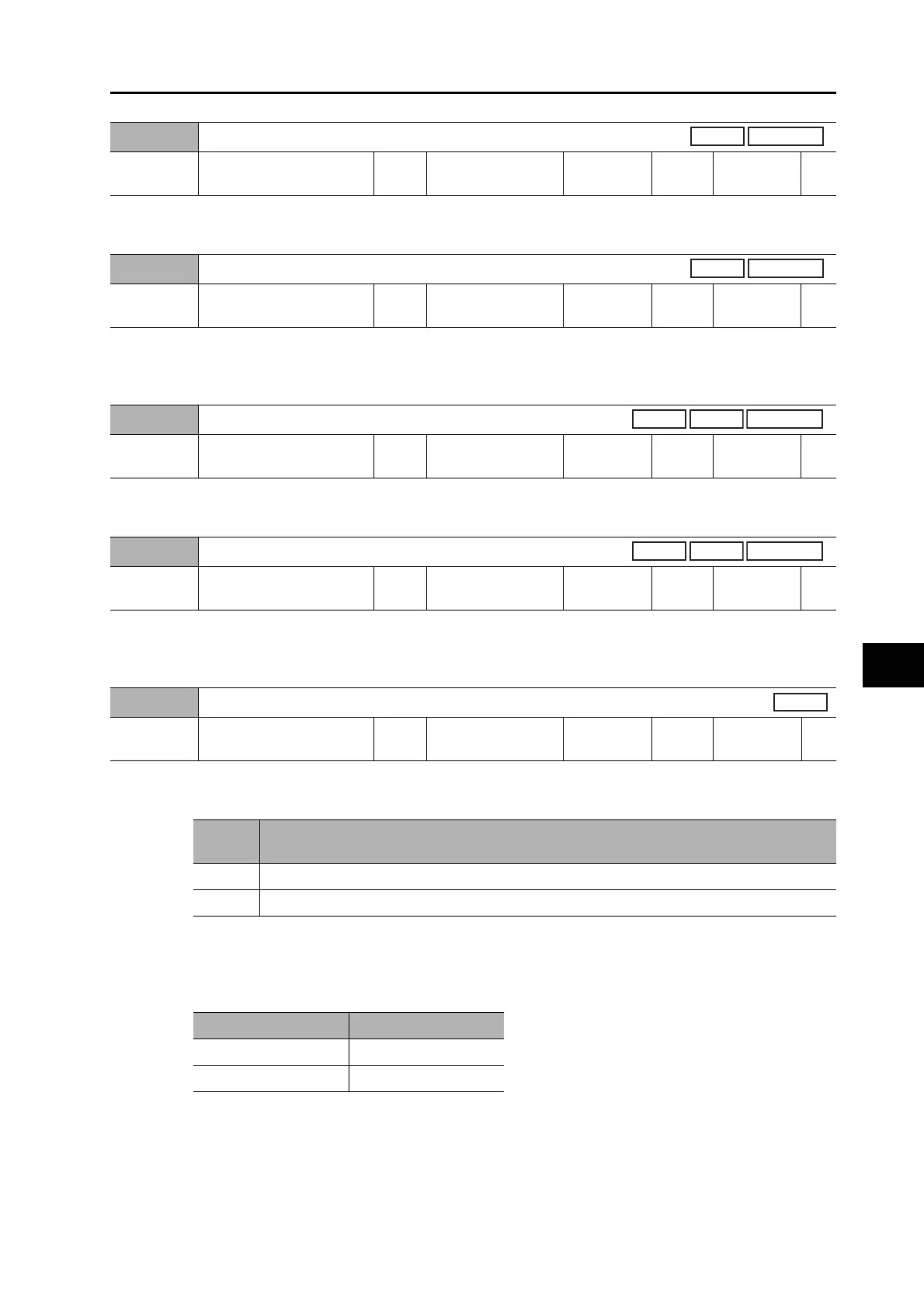
Pn110
Speed Feed-forward Amount
Setting
range
0 to 1,000 Unit 0.1%
Default
setting
300
Power OFF
and ON
−
Position
Fully-closed
Pn111
Speed Feed-forward Command Filter
Setting
range
0 to 6,400 Unit 0.01 ms
Default
setting
50
Power OFF
and ON
−
Position
Fully-closed
Pn112
Torque Feed-forward Amount
Setting
range
0 to 1,000 Unit 0.1%
Default
setting
0
Power OFF
and ON
−
Position
Speed
Fully-closed
Pn113
Torque Feed-forward Command Filter
Setting
range
0 to 6,400 Unit 0.01 ms
Default
setting
0
Power OFF
and ON
−
Position
Speed
Fully-closed
Pn114
Gain Switching Input Operating Mode Selection
Setting
range
0 or 1 Unit −
Default
setting
1
Power OFF
and ON
−
Set
value
Description
0 Gain 1 (PI/P switching enabled)
1 Gain 1/gain 2 switching available
Gain input Speed loop operation
GSEL OFF PI operation
GSEL ON P operation
 Loading...
Loading...