6
6-51
6-16 Feed-forward Function
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
Applied Functions
6-16 Feed-forward Function
Outline of Operation
The feed-forward function come in 2 types: speed feed-forward and torque feed-forward.
The speed feed forward can minimize the position error and increase the responsiveness by
calculating the speed control command that is required for the operation based on the internal
positioning command during position or fully-closed control, and adding it to the speed
command that is calculated based on the comparison with the position feedback.
The torque feed forward can increase the responsiveness during speed control by calculating
the torque command that is required for the operation based on the speed control command,
and adding it to the torque command that is calculated based on the comparison with the
speed feedback.
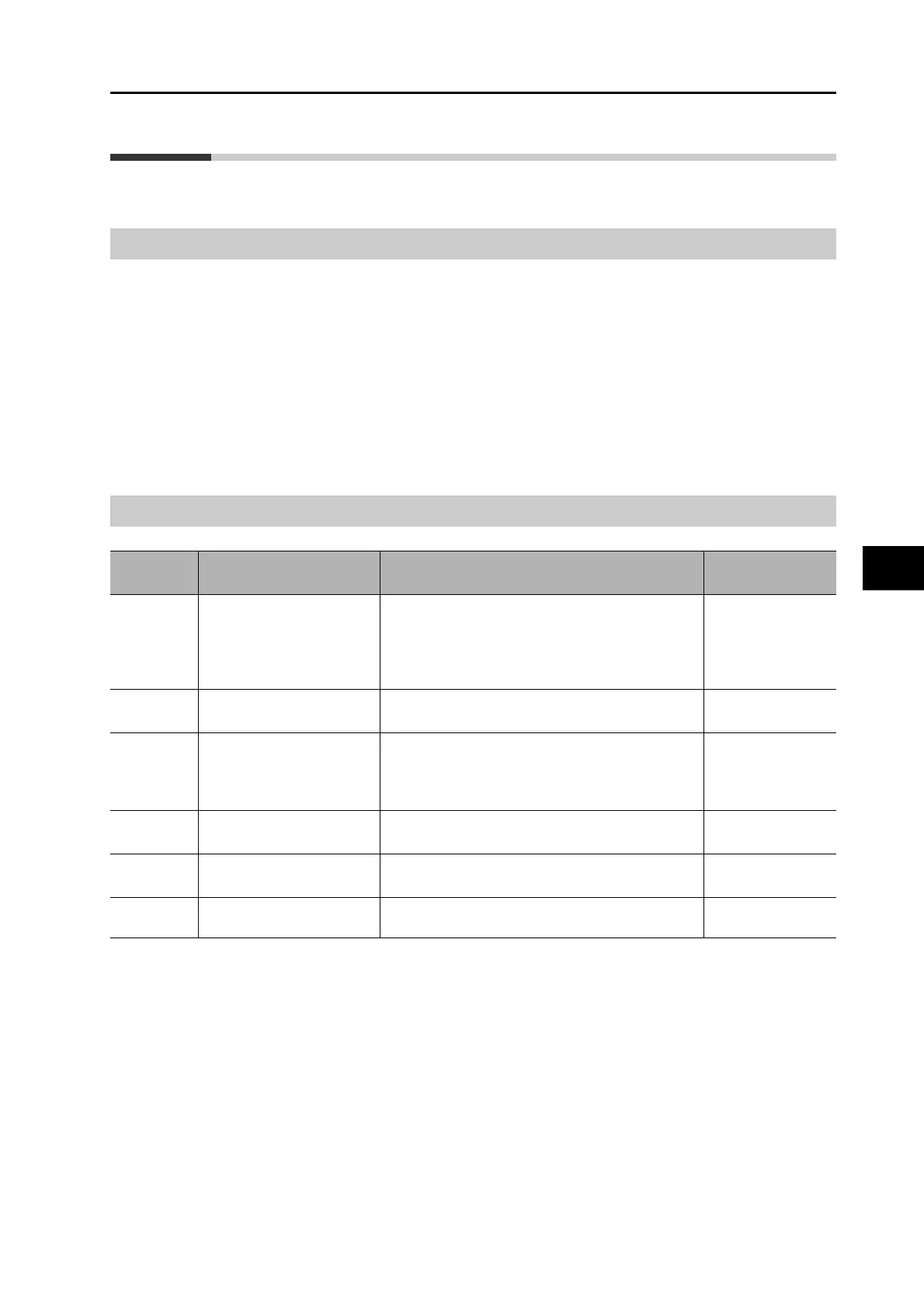
Parameters Requiring Settings
Parameter
number
Parameter name Explanation Reference
Pn110
Speed Feed-forward
Amount
Use this parameter to add the speed control
command calculated from the internal positioning
command that is multiplied by this parameter's ratio
to the speed command from the position control
process.
P.8-12
Pn111
Speed Feed-forward
Command Filter
Set the time constant for the first-order lag filter that
is applied to speed feed-forward input.
P.8-12
Pn112
Torque Feed-forward
Amount
Use this parameter to add the torque command
calculated from the speed control command that is
multiplied by this parameter's ratio to the torque
command from the speed control process.
P.8-12
Pn113
Torque Feed-forward
Command Filter
Set the time constant for the first-order lag filter that
is applied to torque feed-forward input.
P.8-12
Pn600
Analog Torque Feed-
forward Gain Setting
Set the input gain of analog torque feed-forward.
0 to 9 will be disabled.
P.8-60
Pn610 Function Expansion Setting Set the bits related to inertia ratio switching. P.8-60

 Loading...
Loading...