7-5
7-2 Operation Example
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
7
Safety Function
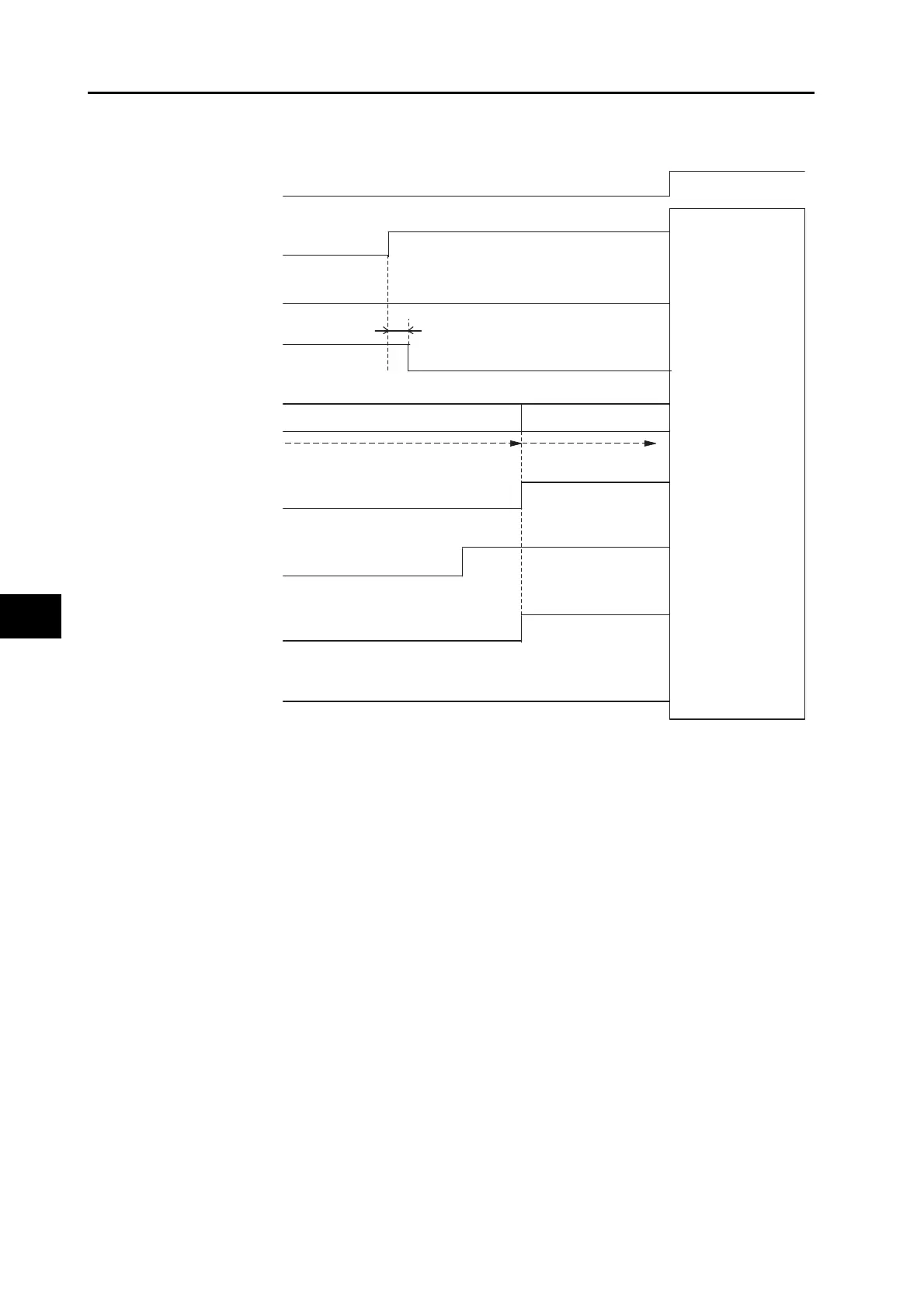
Timing of Return from the Safety Status
*1. Make sure that servo ON input is turned OFF when you return the input signals of safety inputs 1 and
2 to ON. Alarm clear must be performed because alarms will occur. Be sure to execute the alarm clear
when both safety inputs 1 and 2 are returned to the ON status. An alarm will occur immediately if the
alarm reset is executed when even one of these is still in the OFF status. Depending on the timing,
another error (Alarm No. 99.0) may occur. If another error occurs, you must turn OFF the power
supply, then turn it ON again.
*2. Since this is a status where alarms will occur, the dynamic brake is based on the Stop Selection for
Alarm Detection (Pn510).
*3. Since this is a normal servo OFF status, the dynamic brake is based on the Stop Selection with Servo
OFF (Pn506) setting.
STO status
Normal status
Servo ON
Servo OFF command
No power supply
Response time = 6 ms max.
READY
Alarm
Brake held
Reset
Normal
DB released/engaged
*2
Servo OFF
DB released/engaged
*3
Alarm occurrence status
Safety input 1
Safety input 2
Operation command
(RUN)
*1
Brake interlock
output (BKIR)
Motor power
is supplied.
Servo ready completed
output (READY)
Alarm output
(ALM)
Alarm reset
input (RESET)
*1
Dynamic
brake relay
EDM output
ON
OFF
Follow the normal
servo ON/OFF
operation timing
diagram upon input
of the operation
command (RUN).
For details, refer to
"6-6 Brake
Interlock."

 Loading...
Loading...