8-7
8-1 Basic Parameters
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
8
Parameter Details
Explanation of Set Values
Set the No. 1 limit value for the output torque of the motor.
Set the range of the error counter overflow level.
Explanation of Set Values
Set the operating method for the 17-bit absolute encoder.
* The default setting is 0 for 100-V Servo Drives of 400 W, 200-V Servo Drives of 750 W to 5 kW, and
400-V Servo Drives of 5 kW or lower.
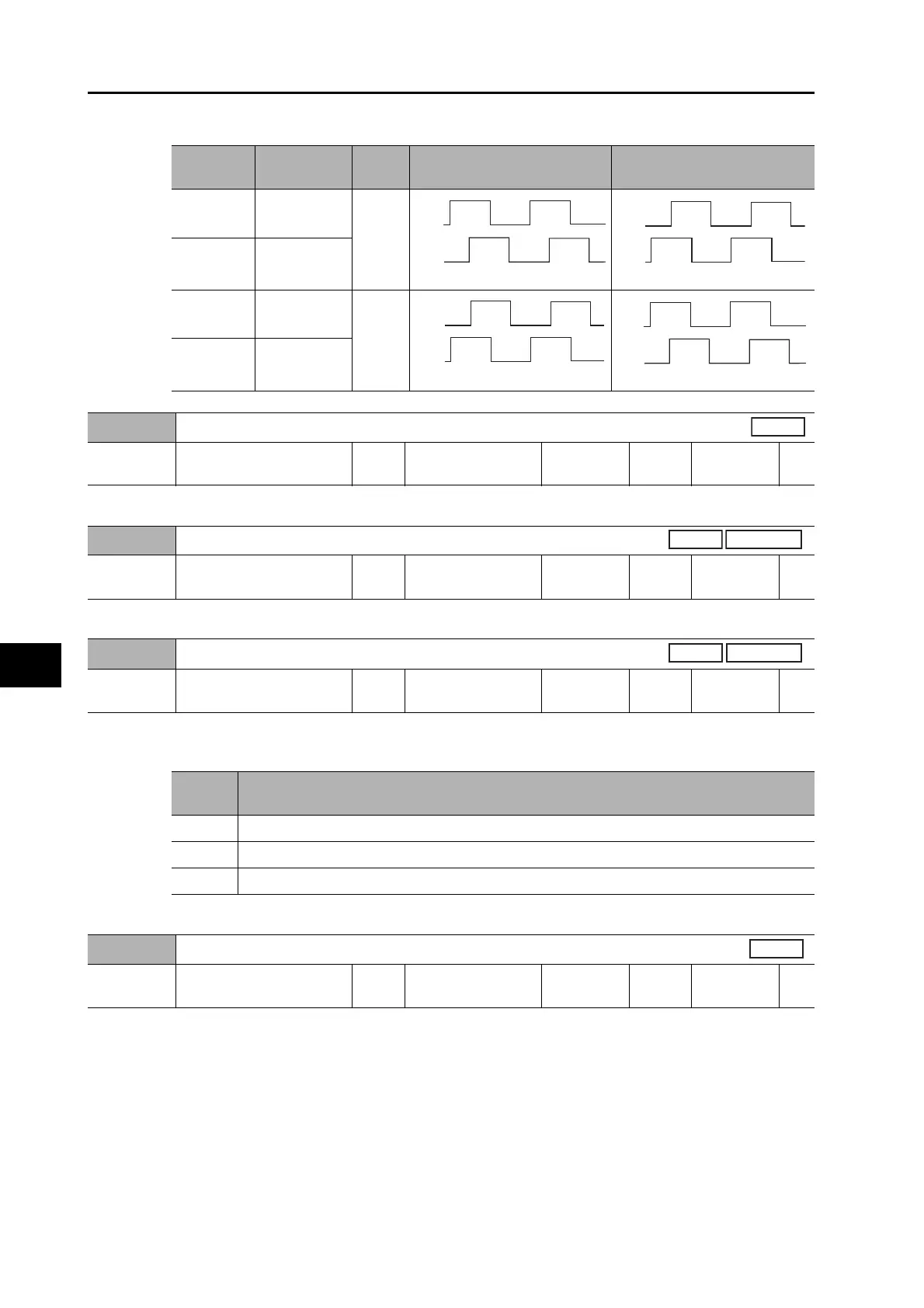
Pn012 set
value
Output
source
Phase B
logic
CCW direction operation CW direction operation
0 Encoder
Non-
reverse
2
External
encoder
1 Encoder
Reverse
3
External
encoder
Phase
A
Phase
B
Pn013
No. 1 Torque Limit
Setting
range
0 to 500 Unit %
Default
setting
500
Power OFF
and ON
−
All
Pn014
Error Counter Overflow Level
Setting
range
0 to 2
27
Unit Command unit
Default
setting
100000
Power OFF
and ON
−
Position
Pn015
Operation Switch when Using Absolute Encoder
Setting
range
0 to 2 Unit −
Default
setting
1
Power OFF
and ON
Yes
Set
value
Description
0 Use as absolute encoder.
1 Use as incremental encoder.
2 Use as absolute encoder but ignore multi-rotation counter overflow.
Pn016
Regeneration Resistor Selection
Setting
range
0 to 3 Unit −
Default
setting
3 *
Power OFF
and ON
Yes

 Loading...
Loading...