.
09 200 200 500 15
10 250 250 400 10
Note 1. The servo-system loop gain will rise in response to a higher rigidity setting, shortening posi-
tioning time. If the setting is too large, however, the machinery may vibrate, so make the set-
ting small.
Note 2. When the rigidity is set, the user parameters in the above table will change automatically.
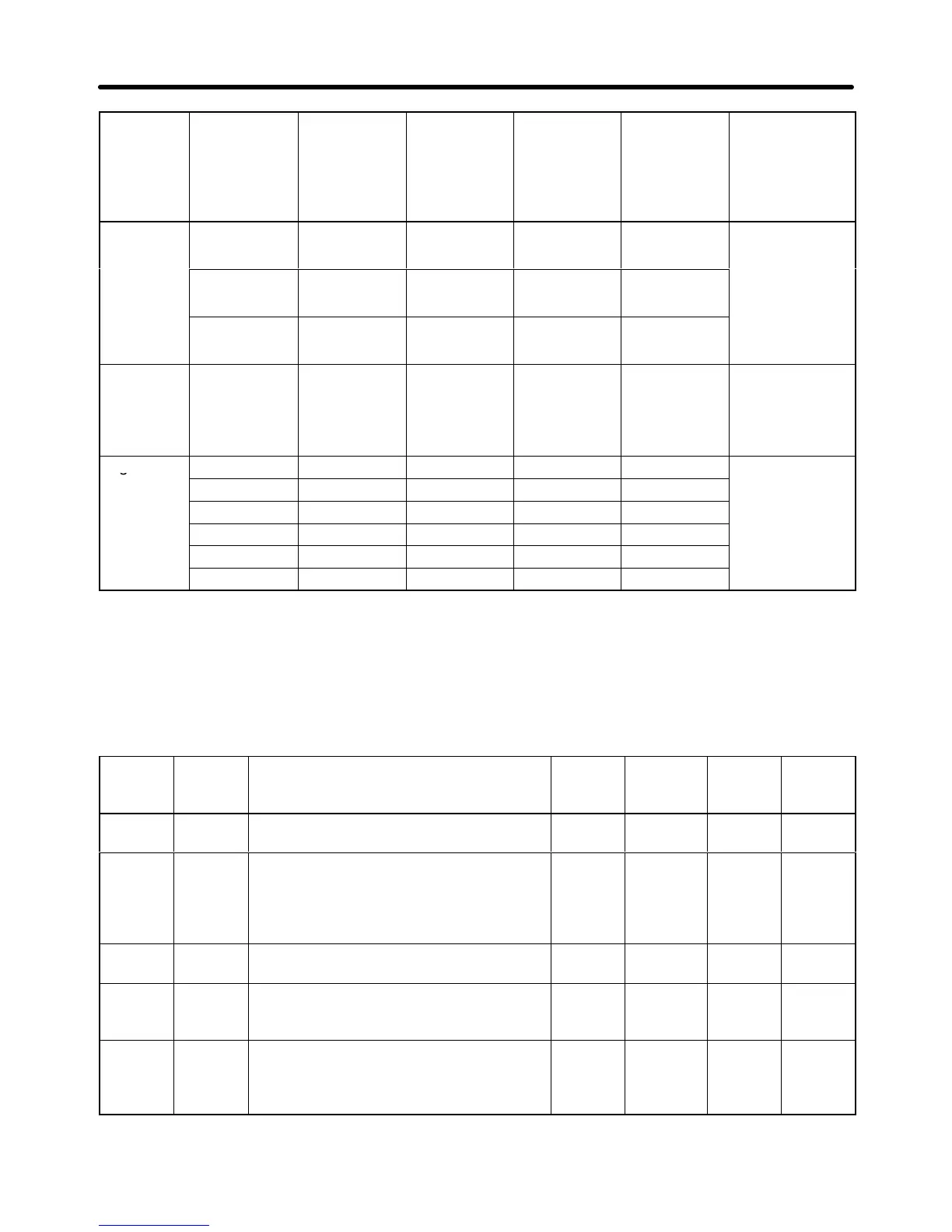
H Manual Tuning-related User Parameters
Parame-
ter No.
Parame-
ter
name
Explanation Default
setting
Unit Setting
range
Restart
power?
Pn100 Speed
loop gain
Adjusts speed loop responsiveness. 80 Hz 1 to
2000
No
Pn101 Speed
loop
integrati
on time
constant
Speed loop integration time constant 2000 x 0.01 ms 15 to
51200
No
Pn102 Position
loop gain
Adjusts position loop responsiveness. 40 1/s 1 to
2000
No
Pn103 Inertia
ratio
Sets the ratio using the mechanical
system inertia to Servomotor rotor inertia
ratio.
300 % 0 to
1000
No
Pn401 Torque
command
filter time
constant
Sets the filter time constant for the
internal torque command.
40 x 0.01 ms 0 to
65535
No
Note Refer to 4-4-4 Parameter Details for details of each parameter.
Operation Chapter 4