Parker EME
Technical Data
192-120102 N7 - February 2004 53
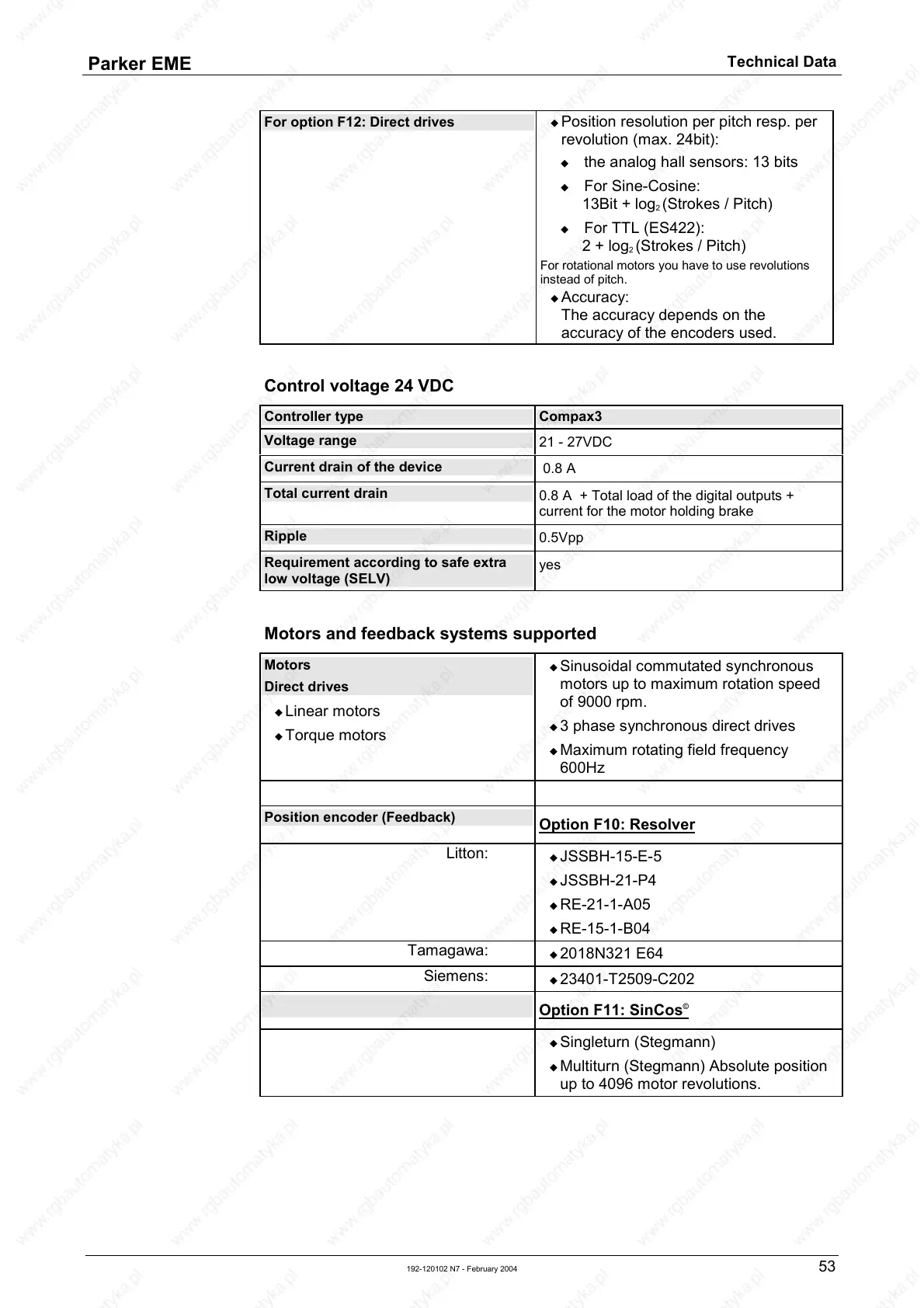
For option F12: Direct drives
! Position resolution per pitch resp. per
revolution (max. 24bit):
! the analog hall sensors: 13 bits
! For Sine-Cosine:
13Bit + log
2
(Strokes / Pitch)
! For TTL (ES422):
2 + log
2
(Strokes / Pitch)
For rotational motors you have to use revolutions
instead of pitch.
! Accuracy:
The accuracy depends on the
accuracy of the encoders used.
Control voltage 24 VDC
Controller type Compax3
Voltage range
21 - 27VDC
Current drain of the device
0.8 A
Total current drain
0.8 A + Total load of the digital outputs +
current for the motor holding brake
Ripple
0.5Vpp
Requirement according to safe extra
low voltage (SELV)
yes
Motors and feedback systems supported
Motors
Direct drives
! Linear motors
! Torque motors
! Sinusoidal commutated synchronous
motors up to maximum rotation speed
of 9000 rpm.
! 3 phase synchronous direct drives
! Maximum rotating field frequency
600Hz
Position encoder (Feedback)
Option F10: Resolver
Litton:
! JSSBH-15-E-5
! JSSBH-21-P4
! RE-21-1-A05
! RE-15-1-B04
Tamagawa:
! 2018N321 E64
Siemens:
! 23401-T2509-C202
Option F11: SinCos
©
! Singleturn (Stegmann)
! Multiturn (Stegmann) Absolute position
up to 4096 motor revolutions.
 Loading...
Loading...









