Step 18Step 17
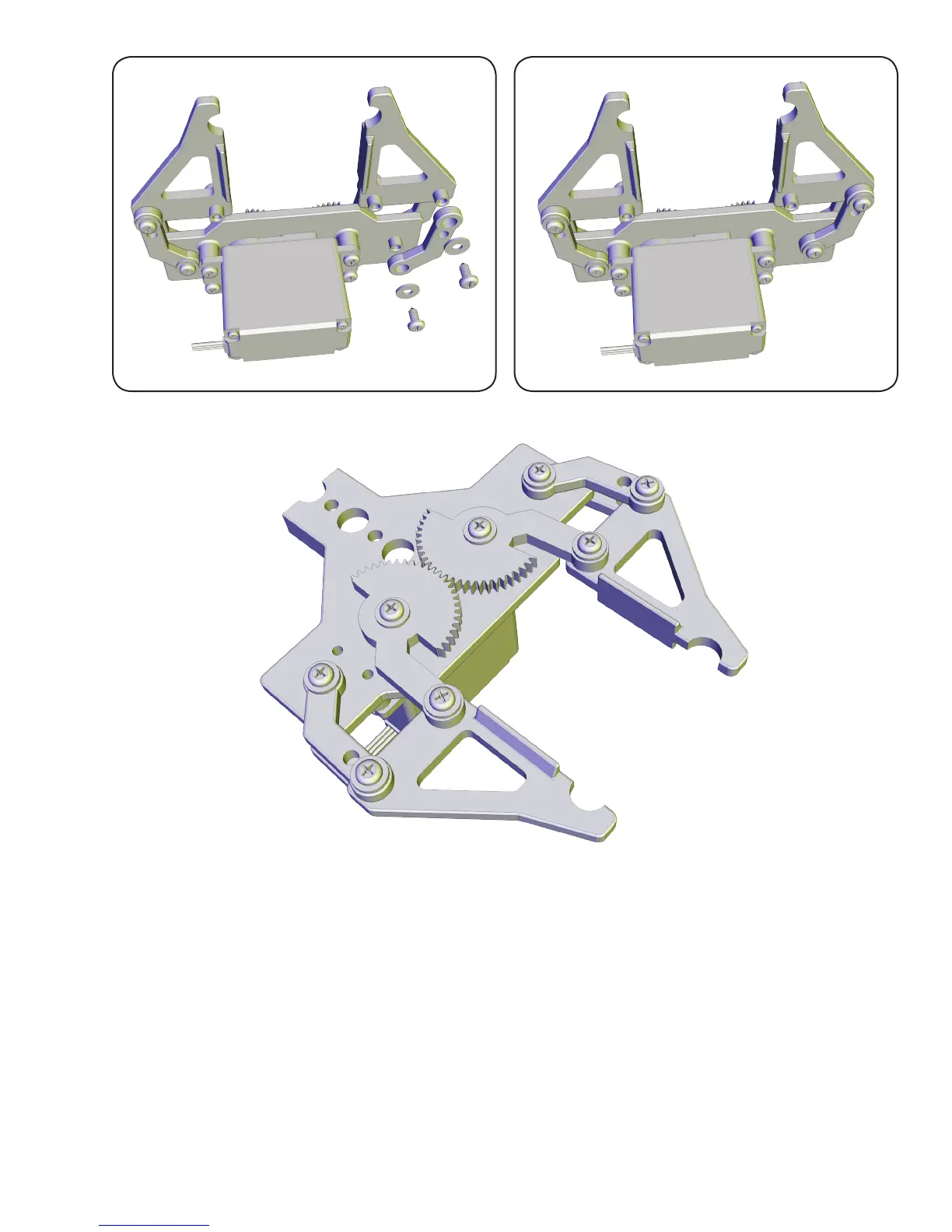
After completing the assembly, verify the operation of the
gripper. Connect the servo to a battery and receiver and operate
the controller to fully open and close the pincers. The pincers
should move parallel to each other and close completely. If
necessary, adjust the position of the gripper gear arms for
correct operation.
19

 Loading...
Loading...
