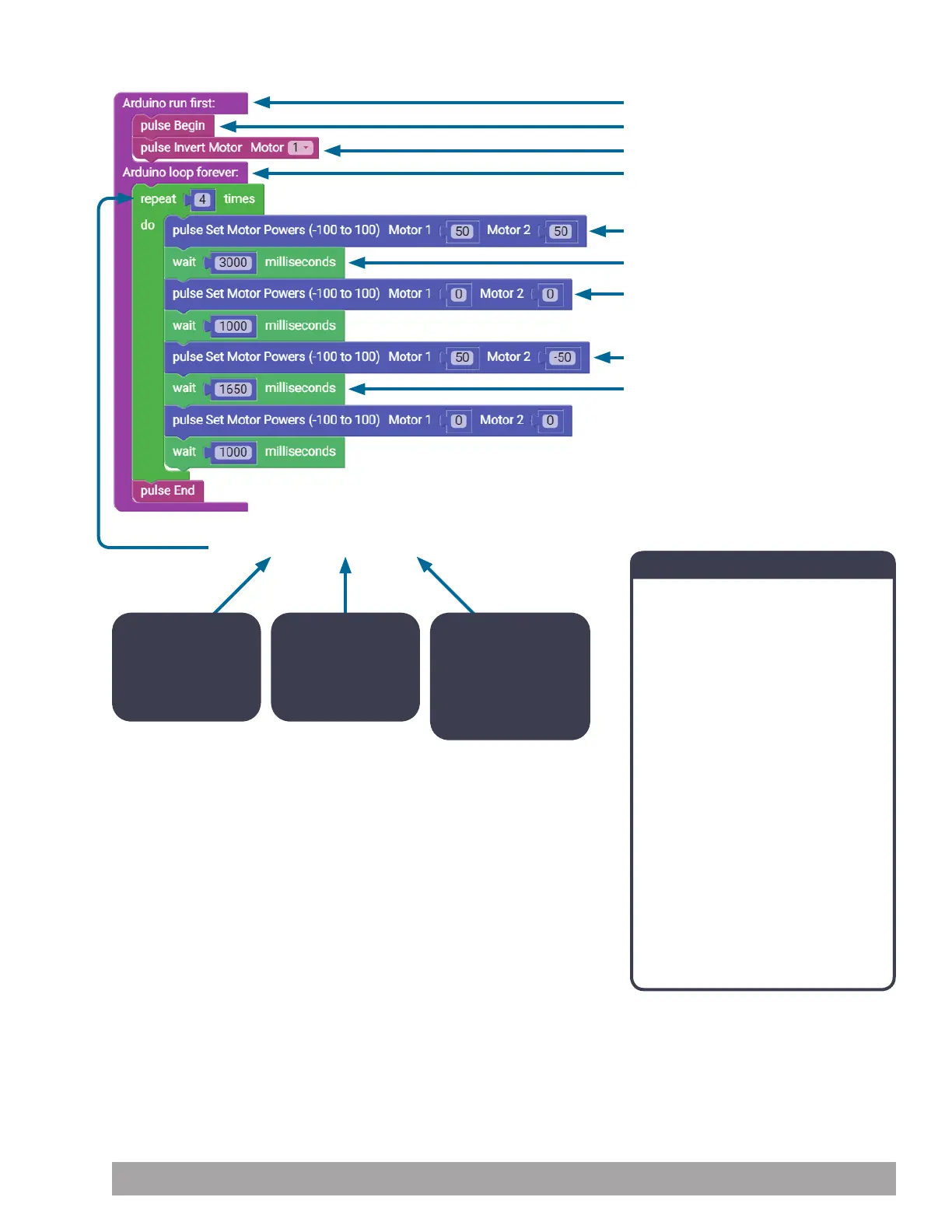
Block-Text Correlation
void setup() {
pulse.PulseBegin();
pulse.setMotorInvert(1,1);
void loop() {
pulse.setMotorPowers(50,50);
delay(3000);
pulse.setMotorPowers(0,0);
pulse.setMotorPowers(50,-50);
delay(1650);
for (int count = 0; count < 4; count++) {
}
Note: This is the
initialization that
happens first and
only once.
Note: This is the
condition that
is tested in each
loop.
Note: The
increment is
executed, and then
the condition is
tested again.
Arduino Source Code
#include <PULSE.h>
PULSE pulse;
void setup() {
pulse.PulseBegin();
pulse.setMotorInvert(1,1);
}
void loop() {
for (int count = 0; count < 4; count++) {
pulse.setMotorPowers(50,50);
delay(3000);
pulse.setMotorPowers(0,0);
delay(1000);
pulse.setMotorPowers(50,-50);
delay(1650);
pulse.setMotorPowers(0,0);
delay(1000);
}
pulse.PulseEnd();
}
Building and Coding the PULSE CodeeBot 103