Activity 11: Drive to a Line and Stop
Introduction
You will begin this activity by adding the Line Finder Sensor to a basic move
forward behavior. This will enable the PULSE Codee Bot to stop based on the
environment around it. In this activity, the Codee Bot will drive forward and stop at
a line.
Open the Program
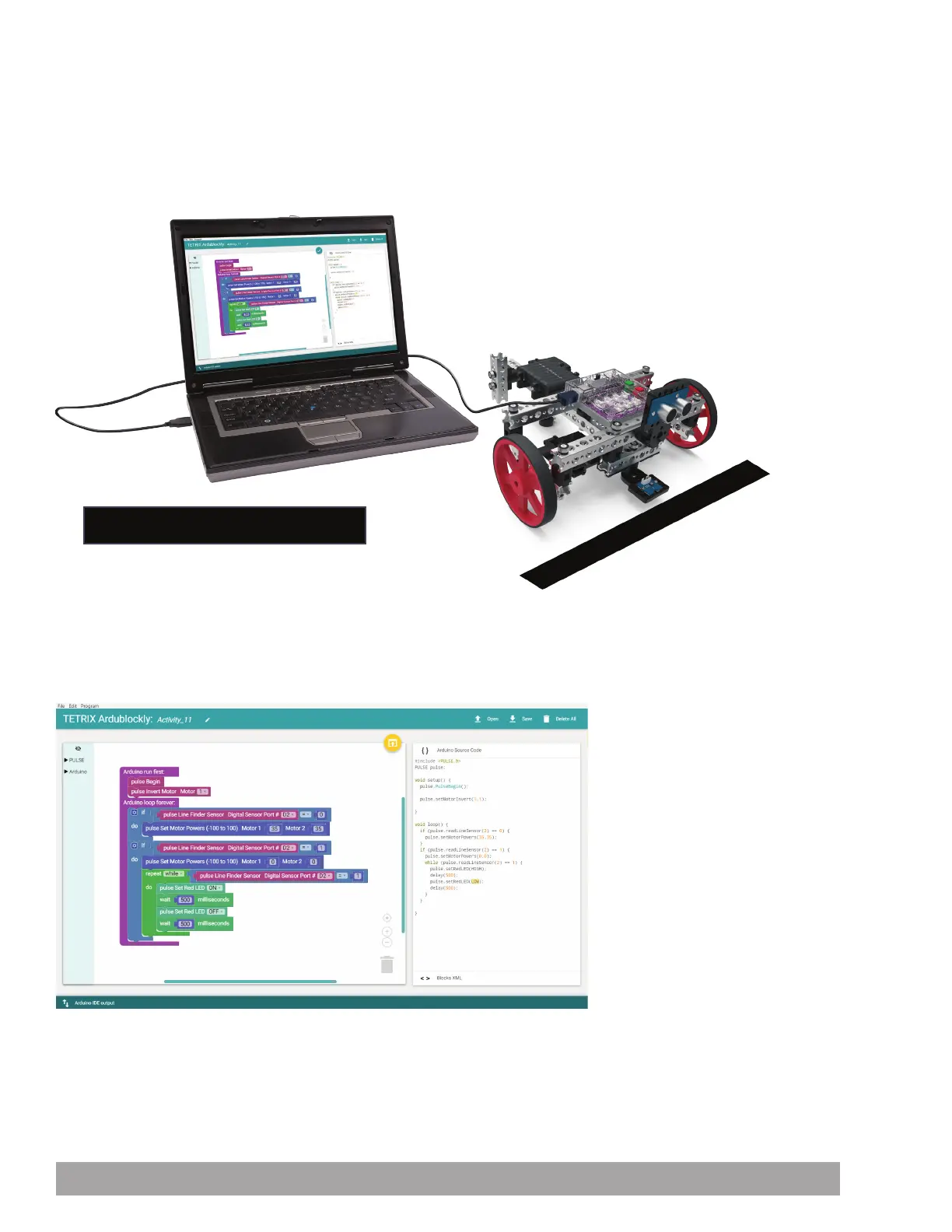
Let’s start by looking at the example sketch. Open the sketch by selecting
Examples > Activity_11. A new sketch window will open titled Activity_11 (Figure
56).
Figure 56
Parts Needed
Black line minimum of 2 inches wide
104 Building and Coding the PULSE CodeeBot