Block-Text Correlation
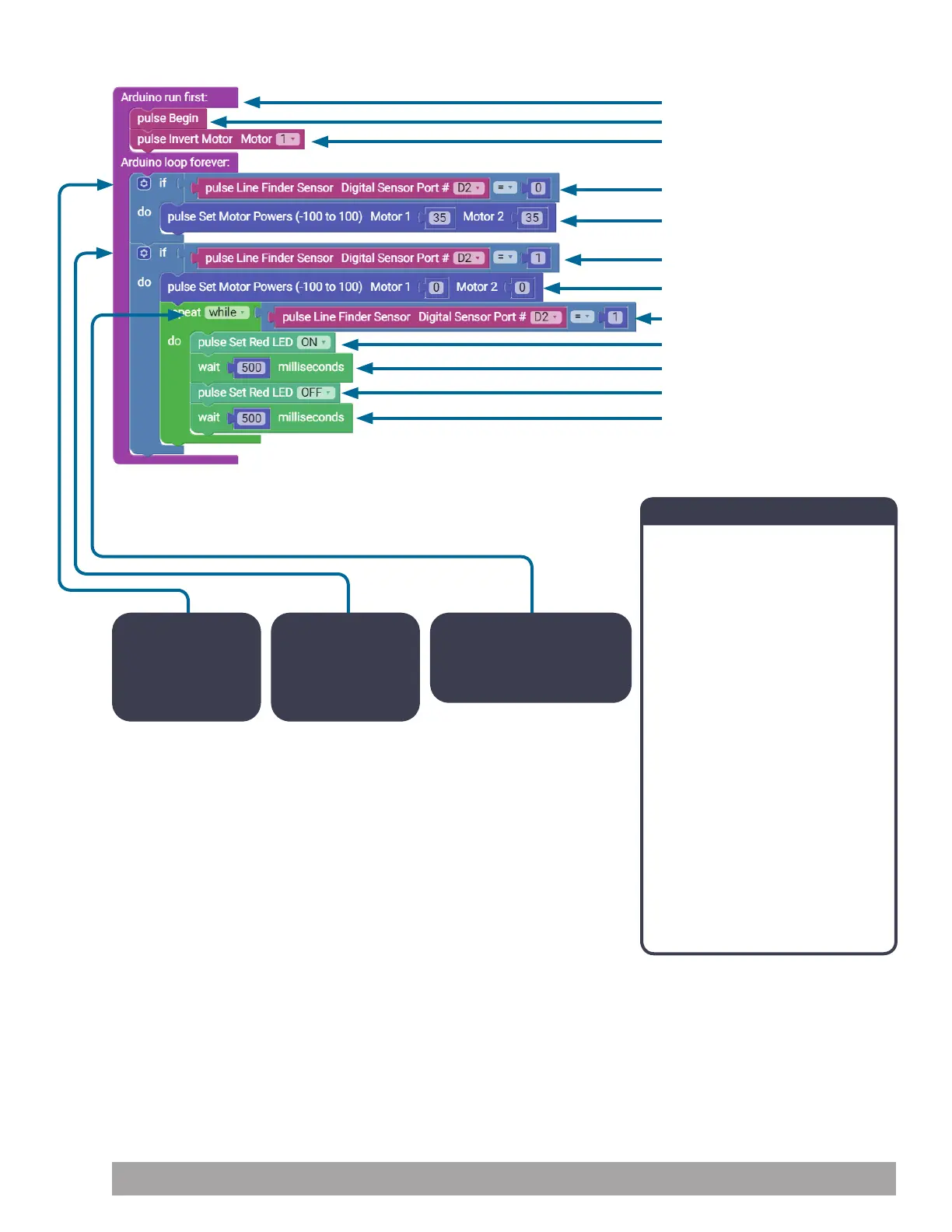
void setup() {
pulse.PulseBegin();
pulse.setMotorInvert(1,1);
if (pulse.readLineSensor(2) == 0) {
pulse.setMotorPowers(35,35);
if (pulse.readLineSensor(2) == 1) {
pulse.setMotorPowers(0,0);
while (pulse.readLineSensor(2) == 1) {
pulse.setRedLED(HIGH);
delay(500);
pulse.setRedLED(LOW);
delay(500);
Note: This if()
loop runs the
motors if the
reading is 0.
Note: This if()
loop stops the
motors if the
reading is 1.
Note: This while() loop
blinks the LED off and on
while the reading is 1.
Arduino Source Code
#include <PULSE.h>
PULSE pulse;
void setup() {
pulse.PulseBegin();
pulse.setMotorInvert(1,1);
}
void loop() {
if (pulse.readLineSensor(2) == 0) {
pulse.setMotorPowers(35,35);
}
if (pulse.readLineSensor(2) == 1) {
pulse.setMotorPowers(0,0);
while (pulse.readLineSensor(2) == 1) {
pulse.setRedLED(HIGH);
delay(500);
pulse.setRedLED(LOW);
delay(500);
}
}
}
Building and Coding the PULSE CodeeBot 107