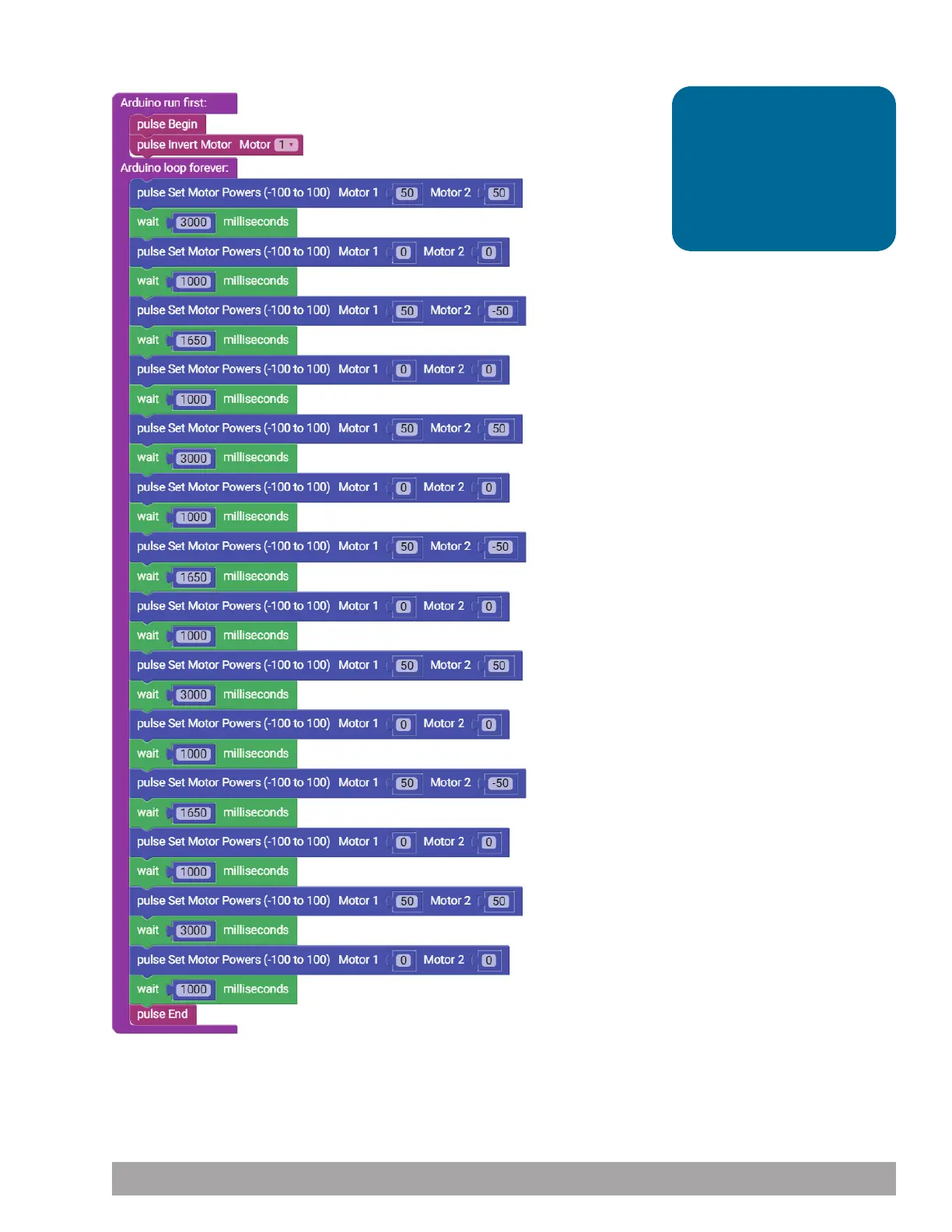
Program Breakdown
Drive forward
Brake
Turn 1
Brake
Drive forward
Brake
Turn 2
Brake
Drive forward
Brake
Turn 3
Brake
Drive forward
Brake
Figure 52
Tip: Adjust the timing of the
turns if the robot doesn’t
turn at right angles. For
example, you can change the
time from 1650 to 1300. The
charge of the battery can
affect the turns.
Building and Coding the PULSE CodeeBot 97