13 / 16
PID initial value hold time
Maximum deviation of twice
outputs(Forward)
Maximum deviation of twice
outputs(Backward)
Computing status after PID stop
0: Stop without computing;
1: Stop with computing
PID automatic decrease frequency
selection
0.00Hz to maximum frequency(F0.19)
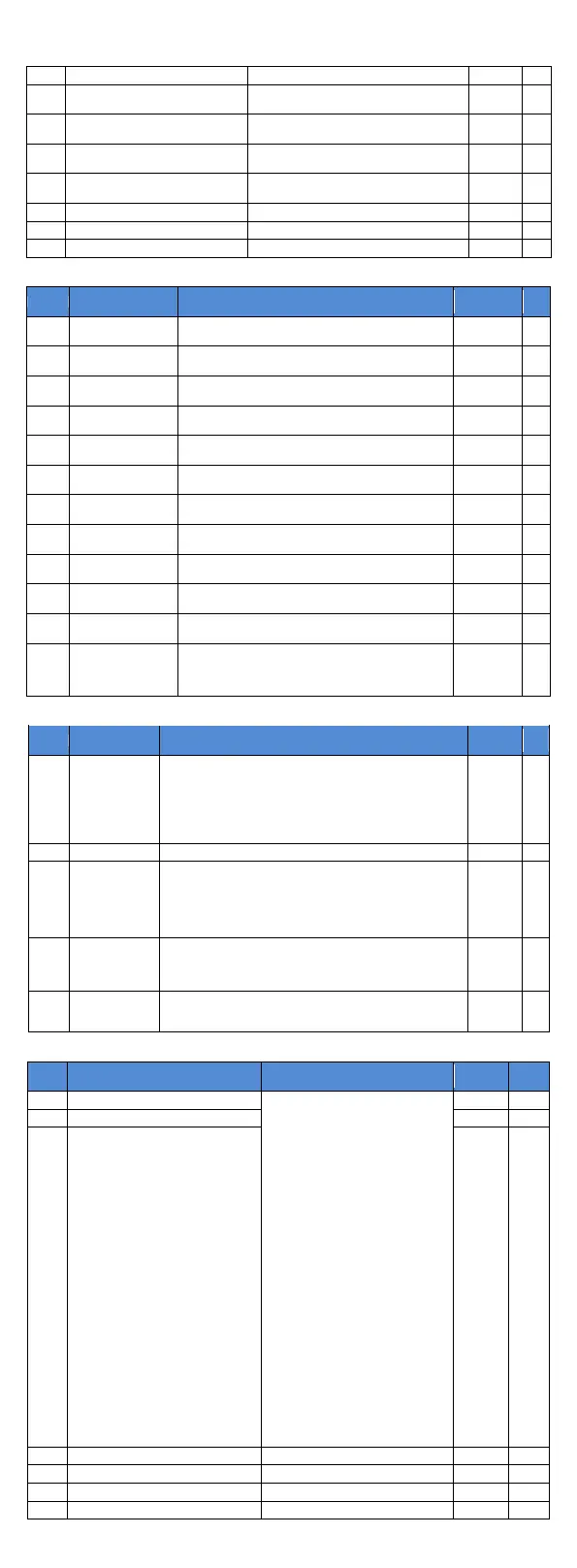
b0 group Motor parameters
0: General asynchronous motor
1: Asynchronous inverter motor
0.01A to 655.35A (Inverter power ≦ 55kW)
0.1A to 6553.5A (Inverter rate> 55kW)
0.01Hz to F0.19 (Maximum frequency)
Asynchronous motor
stator resistance
0.001Ω to 65.535Ω (Inverter power <= 55kW)
0.0001Ω to 6.5535Ω (Inverter power> 55kW)
Asynchronous motor
rotor resistance
0.001Ω to 65.535Ω (Inverter power <= 55kW)
0.0001Ω to 6.5535Ω (Inverter power> 55kW)
Asynchronous motor
leakage inductance
0.01mH to 655.35mH (Inverter power <= 55kW)
0.001mH to 65.535mH (Inverter power> 55kW)
Asynchronous motor
mutUal inductance
0.1mH to 6553.5mH (Inverter power <= 55kW)
0.01mH to 655.35mH (Inverter power> 55kW)
Asynchronous motor
no-load current
0.01A to b0.03 (Inverter power <= 55kW)
0.1A to b0.03 (Inverter power> 55kW)
Motor parameter
auto tunning
0: No operation
1: Asynchronous motor parameters still auto tunning
2: Asynchronous motor parameters comprehensive auto
tunning
y0 group Function code management
0:Nno operation
1: Restore default parameter values, not including motor
parameters
2: Clear history
3: Restore default parameter values, including motor parameters
4: Backup current user parameters
501: Restore from backup user parameters
Function
parameter group
display selection
Units digit: d group display selection
0: Not displays 1: Displays
Tens digit: E group display selection(The same above)
Hundreds digit:b group display selection(The same above)
Thousands digit:y group display selection(The same above)
Tens thousands digit:L group display selection(The same above)
Personality
parameter group
display selection
Units digit:User’s customization parameter display selection
0:Not display 1:Display
Tens digit :User’s change parameter display selection
0:Not display 1:Display
Function code
modification
properties
0: Modifiable
1: Not modifiable
y1 group Fault query parameter group
0: No fault
1: Inverter unit protection
2: Acceleration overcurrent
3: Deceleration overcurrent
4: Constant speed overcurrent
5: Acceleration overvoltage
6: Deceleration overvoltage
7: Constant speed overvoltage
8: Control power failure
9: Undervoltage
10: Inverter overload
11: Motor overload
13: Output phase loss
14: Module overheating
15: External fault
16: Communication abnormal
17: Contactor abnormal
18: Current detection abnormal
19: Motor self-learning abnormal
21: Parameter read and write abnormal
22: Inverter hardware abnormal
23: Motor short to ground
26: Running time arrival
27: Custom fault 1
28: Custom fault 2
29; Power-on time arrival
31: PID feedback loss when running
40: Fast current limiting timeout
51:Initial position error
COF: communication failure
Type of the third(at last) fault
Frequency of the third(at last) fault
Current of the third(at last) fault
Bus voltage of the third(at last) fault
Input terminal status of the third(at

 Loading...
Loading...

