WorkHorse Mariner ADCP User's Guide
P/N 957-6169-00 (April 2005) page 13
• The deck box is not designed to withstand water. Use cau-
tion when using on decks in wet conditions.
• Avoid using ferro-magnetic materials in the mounting
fixtures or near the Workhorse. Ferro-magnetic materials
affect the compass.
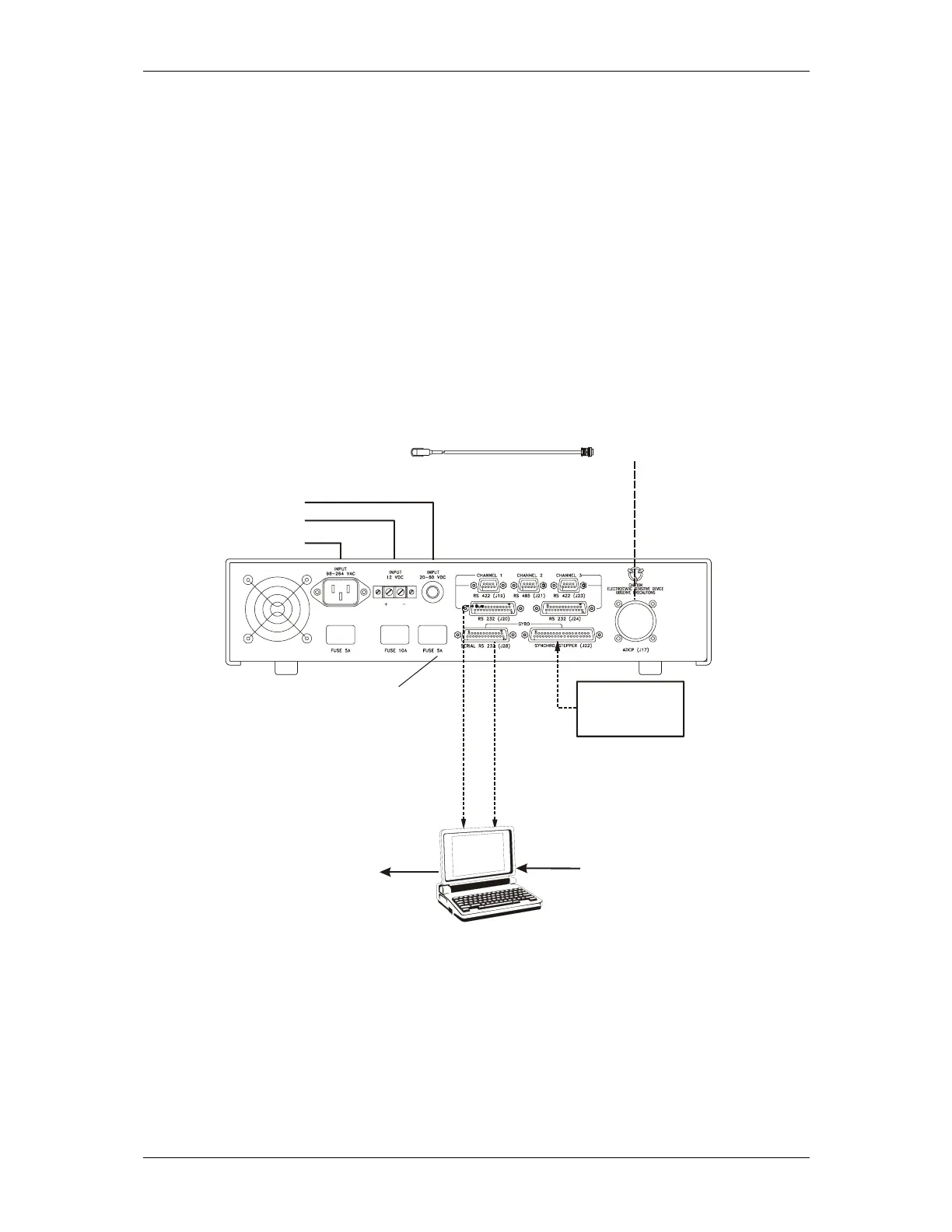
5 Setup the WorkHorse Mariner ADCP
Figure 9 illustrates how to connect the WorkHorse Mariner cables on your
workbench. You will need a container of water large enough to submerge
the WorkHorse’s transducer head into during testing (two to three inches of
water is sufficient). Testing the WorkHorse out of water may cause some
tests to fail but causes no harm to the WorkHorse.
TO J17
INPUT POWER
NAVAGATION
DEVICE
FROM
TO
ENSEMBLE-OUT
DEVICE
FROM (J22)
TO GYRO
FROM CHANNEL 1
(J20 RS-232 or J19 RS-422)
TO COMPUTER
COMPUTER
DECK BOX (REAR VIEW)
EXTERNAL RS-232 (J28)
GYROCOMPASS DATA
DC 20-60 VOLT
AC 98-264 VOLT
DC 12 VOLT
(CHOOSE ONE INPUT VOLTAGE)
(OPTIONAL)
(OPTIONAL)
(OPTIONAL)
(OPTIONAL)
(REQUIRED FOR COMMUNICATION AND TESTING)
TO COMPUTER
TO ADCP
I/O CABLE
Figure 9. WorkHorse Mariner Connections
5.1 Serial Communication
The standard communications settings for WorkHorse Mariners is RS-422,
9600-baud, no parity, 8 data bits and 1 stop bit. The Deck Box converts