Functional description
10
01.00 | Electric gripper EGP with safety functions | System description | en | 1381596
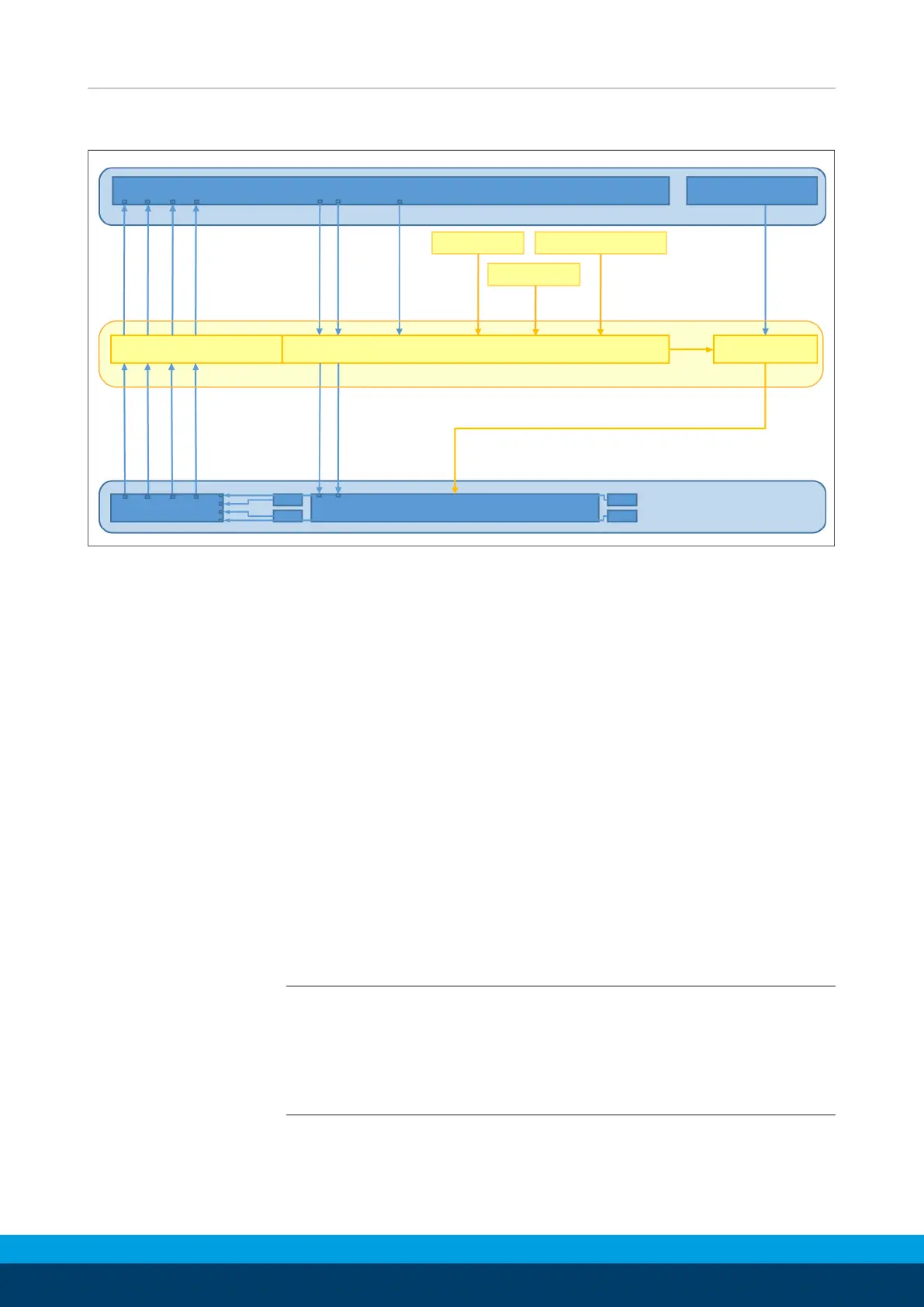
4.2 Block diagram
Gripper open 2
Non-safe (superordinate) control system
Power supply
Ub = 24V DC ±10%
Sensor logic
Evaluation logic
Relays
Gripper open 1
Gripper closed 1
Gripper closed 2
Gripper closed 2
Gripper closed 1
Gripper open 2
Gripper open 1
Open
Close
Close
Open
Reset
Confirmation button
Enable
Emergency Stop
Interface system
Safety sensors and evaluation logic
Gripper voltage supply
EGP
S
S
S
S
Sensor distributor
SCHUNK products
Block diagram
4.3 Superordinate control system
The superordinate control system can be run in safe on non-safe
mode. There are no special requirements for the superordinate
control system. It must be ensured that the connections are made
for safety technology comply with the requirements of
ENISO13849-1.
When using a safe superordinate control system, the sensor and
evaluation logic that must be executed safely can be implemented
in the superordinate control system. In this case, no additional
control system is needed.
It must be ensured that the safety connections comply with the
application-specific requirements of ENISO13849-1.
If an external relay is used, it may be necessary to use additional
signals for monitoring and safe state change. When using integ-
rated safe relays, this may be adopted by the safety control sys-
tem.
NOTE
In release mode, the superordinate control must check the plaus-
ibility of the redundant sensor signals provided by the safety con-
trol system. In release mode, the sensor signals are merely looped
through the safety control system.