GAOOIINO
SIGNAL
IITN;PIH
PINSlGNALNAMf
•
2
·HEAD SELECT 2'
31
•-HEAD SELECT2'
5
a
·WRITE GATE
T:
at·SEEK COMPlETE
9
10
•TRACK _
tI
12t·WRITE FAUt. T
13
14·HEAD SELECT
ZO
15
18·RECOVERY MODE
17
18·HEAD SELECT 2'
19
lOt
.INDEX
2.
22t
·READY
2:J
24
·STEP
25
28
.lJRIVE SELECT I
27
28·ORIVE SELECT 2
2!!1
30
·DRIVE SELECT 3
3t
32·DRIVE SELECT 4
331
34·DIRECTION IN
tSTATUSENABLED WITH DRIVE SELECT
HOST
1T221
FLAT RISSO" OR TWISTED PAIR 20 fT. MAX
----
- HEAD SELECT 2'
3
- HEAD SELECT 2'
•
S
-WRITE GATE
•
- SEEK COMPlETE
TRACK'
- WRITE FAUlT- HEAD SELECT
2<RECOVERY t.AOOE
17..•
I
J.I
- HEAD SELECT 2'
11
-ONCEX
20
- READY
22
- STEP
2.
- DRIVE SELECT I
- READY
DC ON rf----4
-/ 17••• typo I-
ROTATIONAl. Y
SPEED REGUlATED
1660 ••••••••• 'od)
1
- TRACK' I: -t ....I-
1~1
~-:-----
f----4-t~ l-
I '11 _
-SEEK COMPLETE J--2- -.--1
I I I
~2'''' __ I
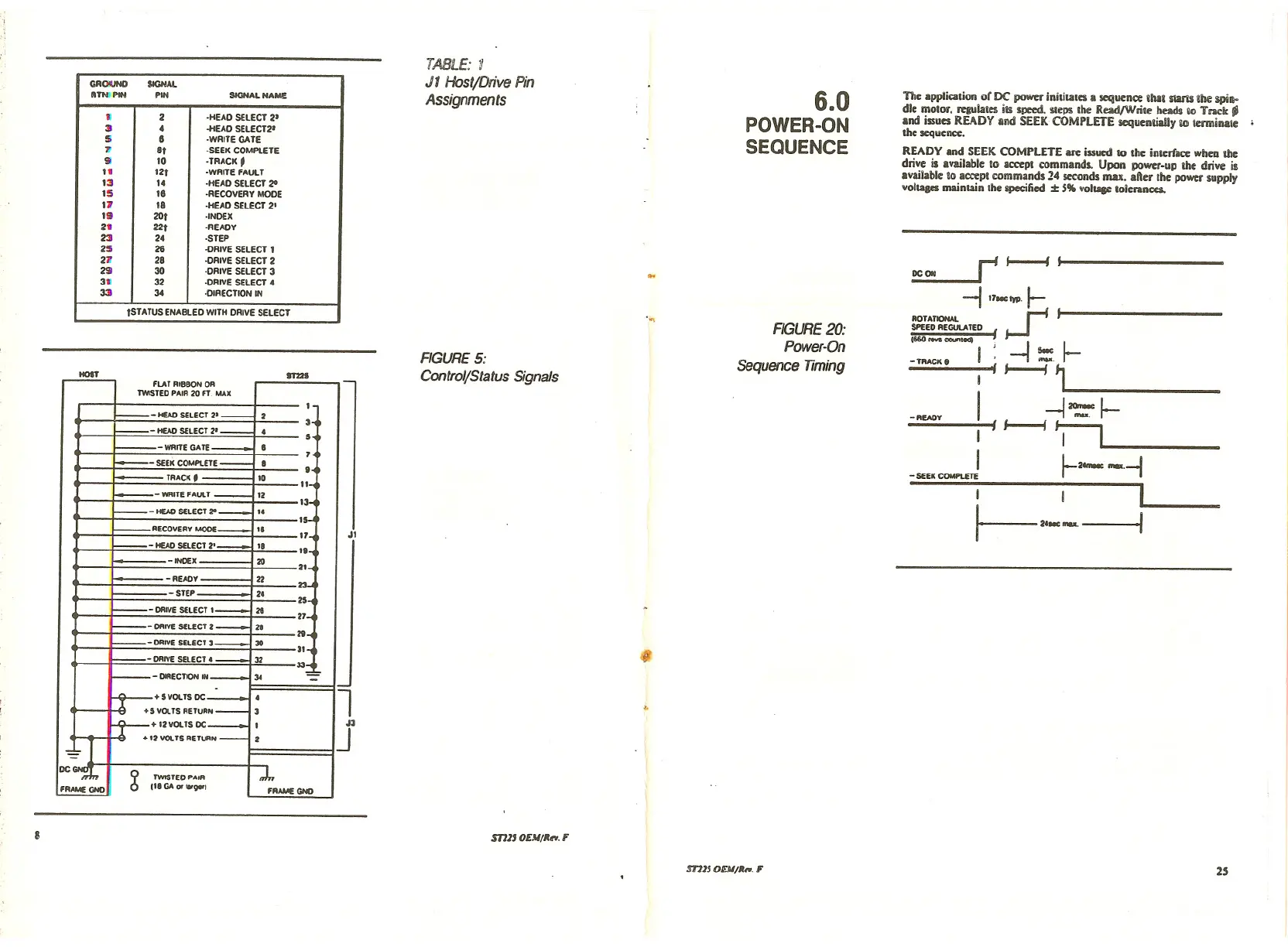
The application of DC power inititates a sequence ihai star1Sihe llpin-
die motor, regulates its speed, $Ieps the Read/Write heads
10 Tm:k _
and i55UesREADY IInd SEEK COMPLETE !lCQuentially
iO terminate
the sequence.
READY and SEEK COMPLETE are i55Ued
10 the interface when ibe
drive il available
10 accept tommands. Upon power-up the drive i$
available 10 accept commands 24 seconds max. after 'he power supply
voltages maintain the specified
± SI!(, vol. tolerancei.
6.0
POWER-ON
SEQUENCE
FIGURE 20:
Power-On
Sequence Timing
'",
i/J
"{ABLE: 9
J1 Host/Drive Pin
Assignments
FIGURE 5:
ControVStatus Signals
l
J3
J
FR.w£ GNO
Q TWJSTEO PAtA6 111 GA '" "'90'1
FRAME GNO
II
mlJ OEM/II". F
mlJ OEM/II".'
25