1 Technical Description
1.5 Functional Description
1.5.8 Complex Functions (Arithmetic blocks c, d, h)
Manual
56
SIP ART DR24 6DR2410
C79000-G7476-C153-03
Integrator with binary input bin1 to bin6
U
N
Lo
ncon
0.000
ncon
LiA, LiEtin, tr
A
t
+Δ
-Δ
N
.A∩
c.F
--
# .1
n
---
bin1 ... bin6
(onPA)tin, LiA, LiE, tr
# .2
∩ .3
# .4
A =
1
tin
1 ⋅ dt + U
No
; = f(E1, E3)
t
0
U
No
=Aattimet=0
tin = 1 to 9984 s integral action time, ProG
LiA = --199.9 % to +199.9 % output limiting min
LiE = --199.9 % to +199.9 % output limiting max
tr = off,1 to 9984 s tracking time
The integral of the constants 1(100 %) of the control inputs +Δ (C**.1) and -- Δ (C**.2) is
formed dependent on the direction over the time. The rise speed is tanα = ΔA/Δt = 100 %/tin.
In position tin = ProG the integral speed is progressive so that setpoints set manually can be
set fast and still with a high resolution when switching with the keys. The output of the integrator
is saved in a non--volatile memory when bAtt = YES is set.
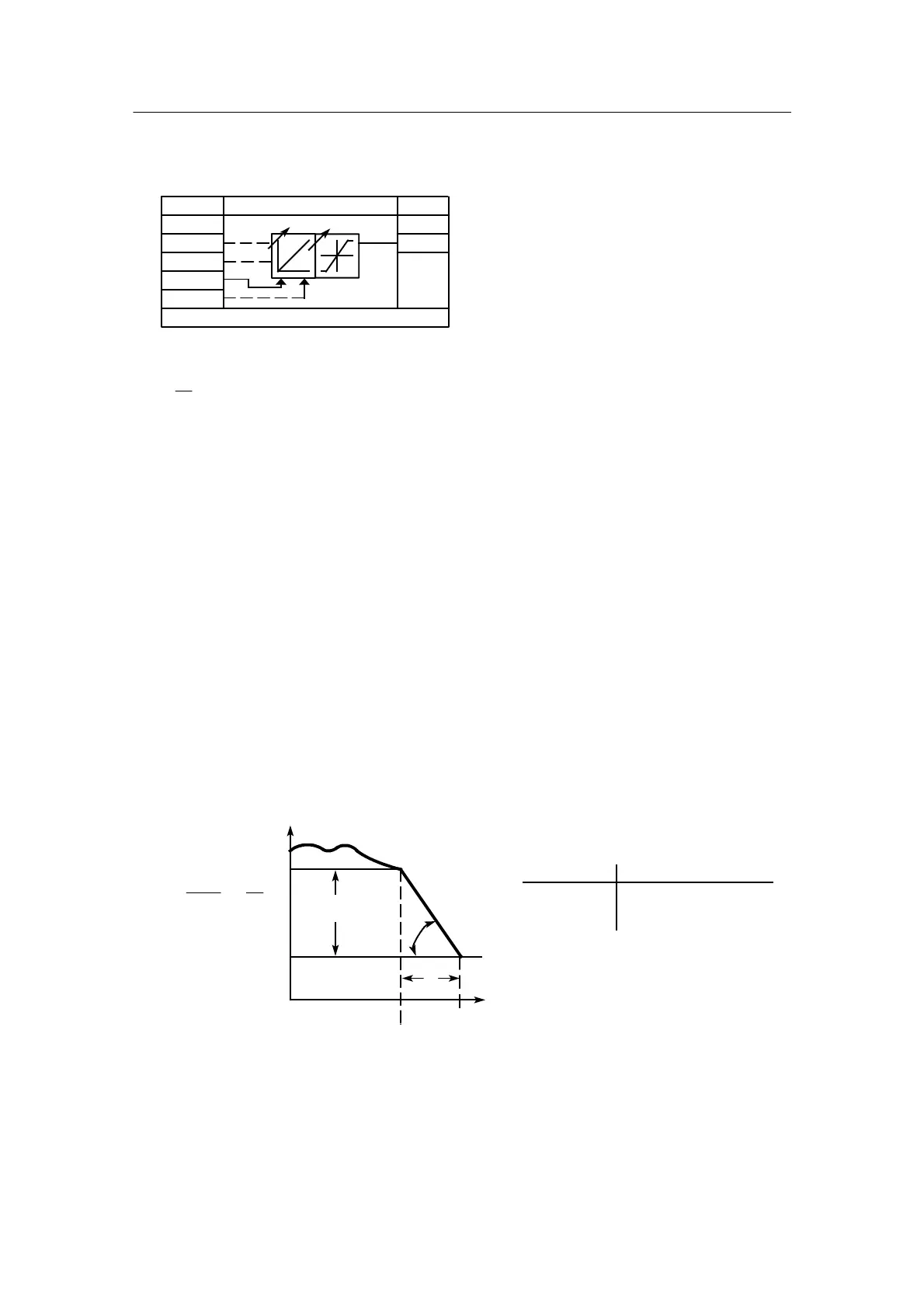
The integrator can be tracked to the value applied at U
N
(C**.3) by the control signal N = Hi
(C**.4). The tracking time is specified by the private parameter tr .
Integration and tracking are only possible within the limits set with LiA and LiE. The minimum
output limit LiA cannot be set greater than the maximum output limit LiE and vice versa.
At Δ=Lo the integrator acts as an analog memory.
Power on Output A
bAtt = no 0.000
bAtt = YES value before turning off
(hdEF) the power supply
N= Hi
Tracking
t
A
N= 0
Integration
U
N
β
ΔA
T
r
tan β =
100 %
t
r
=
ΔA
T
r
The following
applies:
Restart conditions:
Figure 1--24 Tracking time tr
 Loading...
Loading...










