8
*飞行速度可在APP里的-档位设置-里更改。
*飞行模式由遥控器序号 的拨动三段开关设置。
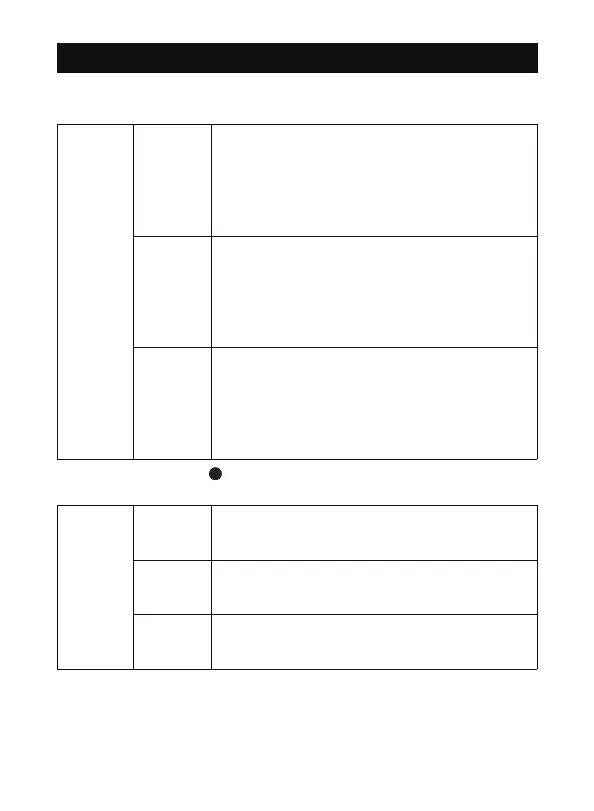
4.1飞行模式
4.飞行器功能
飞行速度
飞行模式
(飞控判
断GPS信
号 ,切 换
相对应的
模式)
定高模式
在GPS信号差或指南针受到干扰,飞行器会进入定
高模式, 只支持手动飞行。定高模式下,飞行器定点
异常,请尽快降落。
使用GPS实现飞行器的精准悬停、稳定飞行模式等。
当飞行器拨到返航档位或失控,飞行器将爬升到返
航高度并自动返航。
GPS模式
返航模式
低速
最大速度 2m/s,上升速度:1.2m/s,下降速度0.4m/s
最大速度 12m/s,上升速度:4.2m/s,下降速度2.0m/s
最大速度 17m/s,上升速度:5.1m/s,下降速度4.9m/s
中速
高速
2
8
*飞行速度可在APP里的-档位设置-里更改。
*飞行模式由遥控器序号 的拨动三段开关设置。
4.1飞行模式
4.飞行器功能
飞行速度
飞行模式
(飞控判
断GPS信
号 ,切 换
相对应的
模式)
定高模式
在GPS信号差或指南针受到干扰,飞行器会进入定
高模式, 只支持手动飞行。定高模式下,飞行器定点
异常,请尽快降落。
使用GPS实现飞行器的精准悬停、稳定飞行模式等。
当飞行器拨到返航档位或失控,飞行器将爬升到返
航高度并自动返航。
GPS模式
返航模式
低速
最大速度 2m/s,上升速度:1.2m/s,下降速度0.4m/s
最大速度 12m/s,上升速度:4.2m/s,下降速度2.0m/s
最大速度 17m/s,上升速度:5.1m/s,下降速度4.9m/s
中速
高速
2